A Rotation-Translation-Decoupled Solution for Robust and Efficient Visual-Inertial Initialization
{kind=link}
Abstract
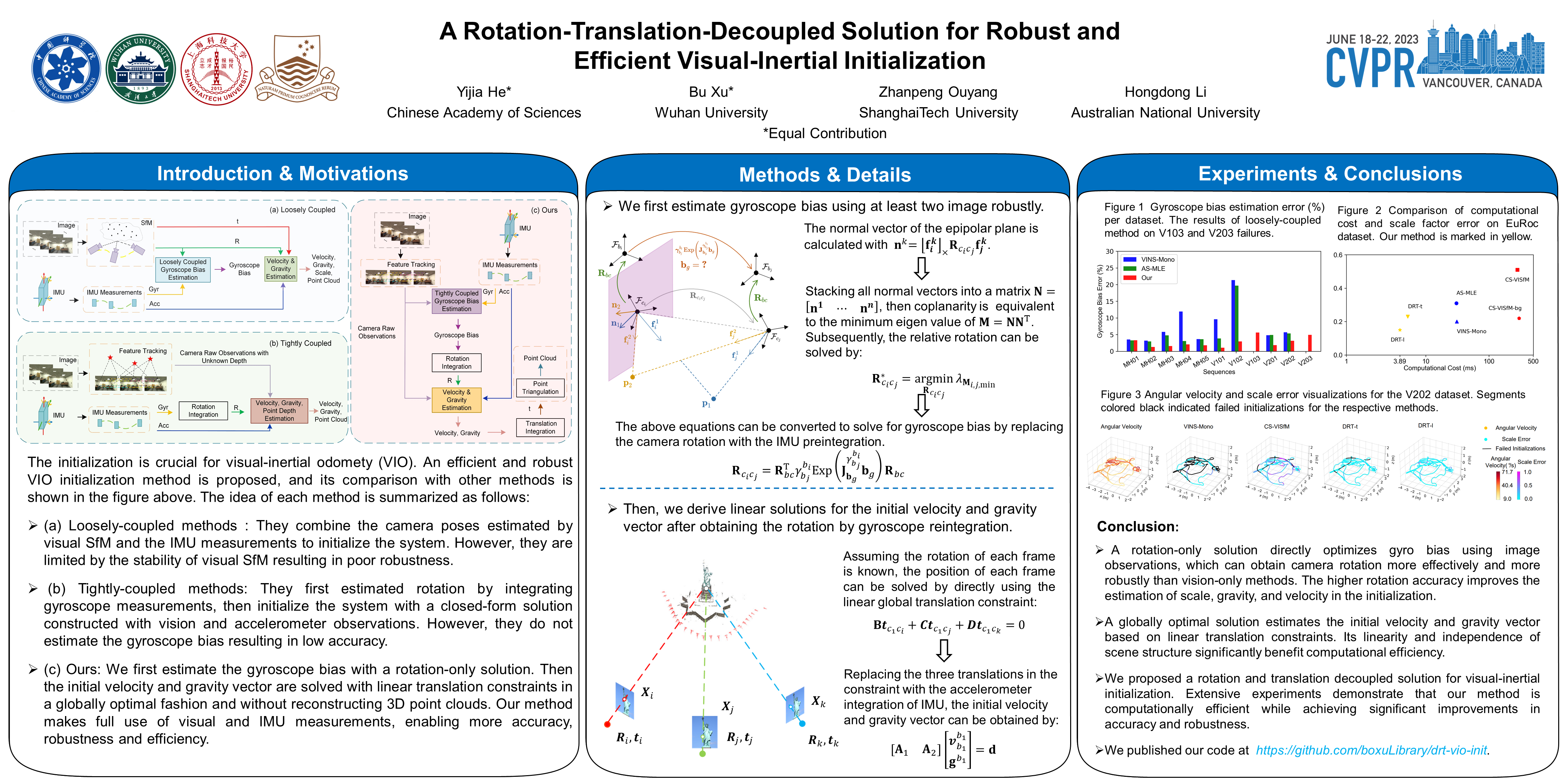
We propose a novel visual-inertial odometry (VIO) initialization method, which decouples rotation and translation estimation, and achieves higher efficiency and better robustness. Existing loosely-coupled VIO-initialization methods suffer from poor stability of visual structure-from-motion (SfM), whereas those tightly-coupled methods often ignore the gyroscope bias in the closed-form solution, resulting in limited accuracy. Moreover, the aforementioned two classes of methods are computationally expensive, because 3D point clouds need to be reconstructed simultaneously. In contrast, our new method fully combines inertial and visual measurements for both rotational and translational initialization. First, a rotation-only solution is designed for gyroscope bias estimation, which tightly couples the gyroscope and camera observations. Second, the initial velocity and gravity vector are solved with linear translation constraints in a globally optimal fashion and without reconstructing 3D point clouds. Extensive experiments have demonstrated that our method is 8~72 times faster (w.r.t. a 10-frame set) than the state-of-the-art methods, and also presents significantly higher robustness and accuracy. The source code is available at https://github.com/boxuLibrary/drt-vio-init.