SlowLiDAR: Increasing the Latency of LiDAR-Based Detection Using Adversarial Examples
{kind=link}
Abstract
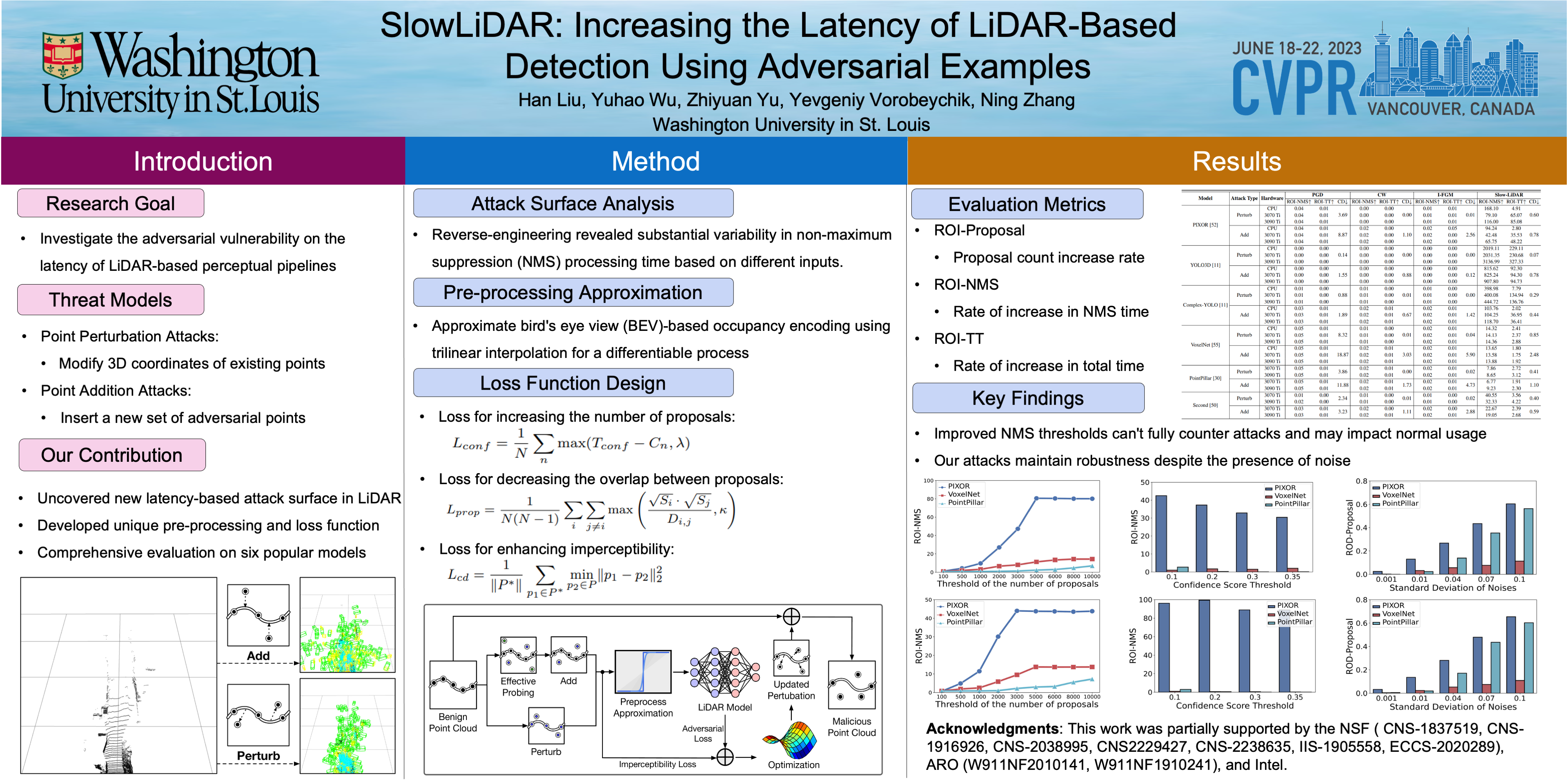
LiDAR-based perception is a central component of autonomous driving, playing a key role in tasks such as vehicle localization and obstacle detection. Since the safety of LiDAR-based perceptual pipelines is critical to safe autonomous driving, a number of past efforts have investigated its vulnerability under adversarial perturbations of raw point cloud inputs. However, most such efforts have focused on investigating the impact of such perturbations on predictions (integrity), and little has been done to understand the impact on latency (availability), a critical concern for real-time cyber-physical systems. We present the first systematic investigation of the availability of LiDAR detection pipelines, and SlowLiDAR, an adversarial perturbation attack that maximizes LiDAR detection runtime. The attack overcomes the technical challenges posed by the non-differentiable parts of the LiDAR detection pipelines by using differentiable proxies and uses a novel loss function that effectively captures the impact of adversarial perturbations on the execution time of the pipeline. Extensive experimental results show that SlowLiDAR can significantly increase the latency of the six most popular LiDAR detection pipelines while maintaining imperceptibility.