ViewNet: A Novel Projection-Based Backbone With View Pooling for Few-Shot Point Cloud Classification
{kind=link}
Abstract
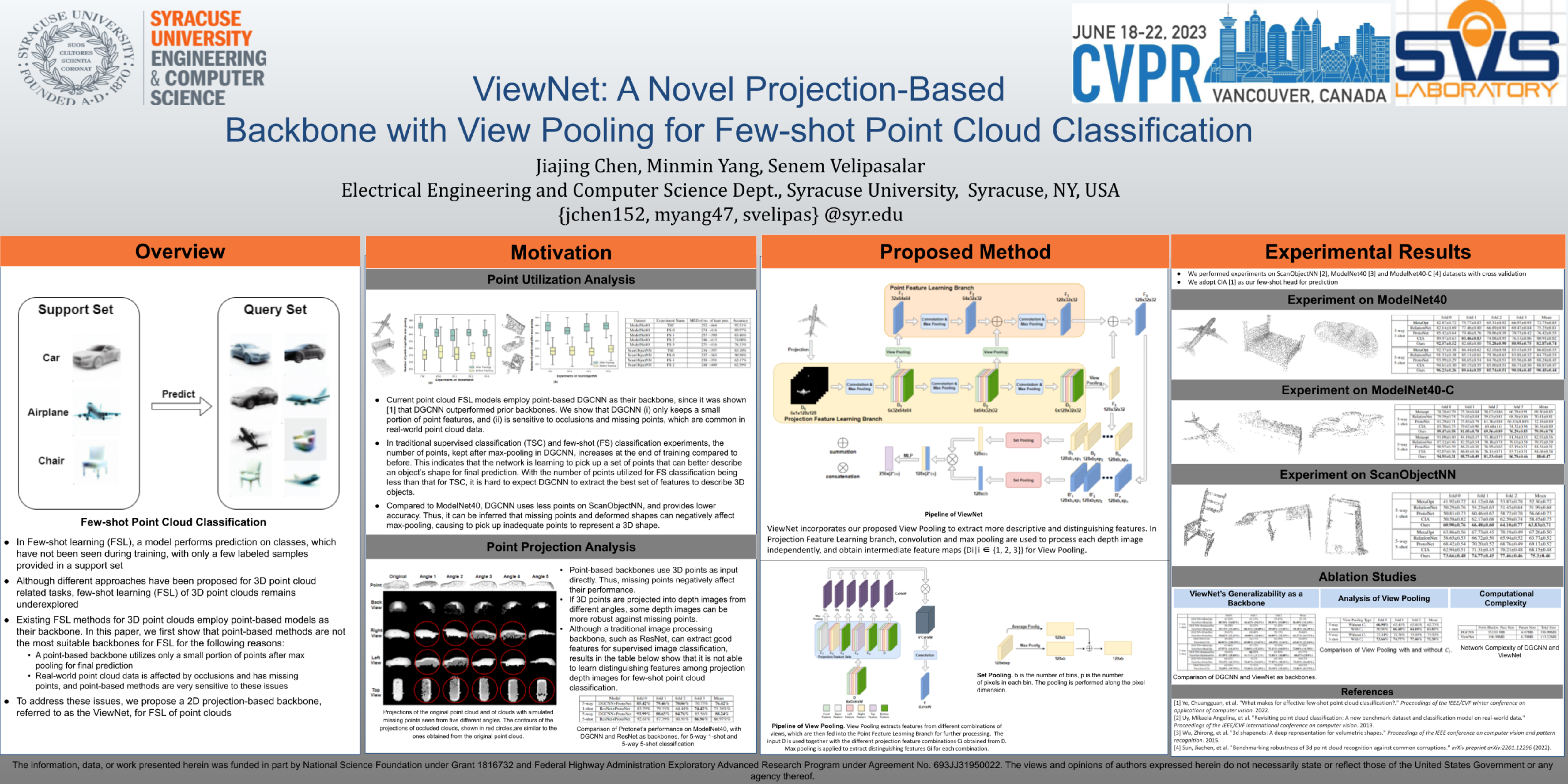
Although different approaches have been proposed for 3D point cloud-related tasks, few-shot learning (FSL) of 3D point clouds still remains under-explored. In FSL, unlike traditional supervised learning, the classes of training and test data do not overlap, and a model needs to recognize unseen classes from only a few samples. Existing FSL methods for 3D point clouds employ point-based models as their backbone. Yet, based on our extensive experiments and analysis, we first show that using a point-based backbone is not the most suitable FSL approach, since (i) a large number of points’ features are discarded by the max pooling operation used in 3D point-based backbones, decreasing the ability of representing shape information; (ii)point-based backbones are sensitive to occlusion. To address these issues, we propose employing a projection- and 2D Convolutional Neural Network-based backbone, referred to as the ViewNet, for FSL from 3D point clouds. Our approach first projects a 3D point cloud onto six different views to alleviate the issue of missing points. Also, to generate more descriptive and distinguishing features, we propose View Pooling, which combines different projected plane combinations into five groups and performs max-pooling on each of them. The experiments performed on the ModelNet40, ScanObjectNN and ModelNet40-C datasets, with cross validation, show that our method consistently outperforms the state-of-the-art baselines. Moreover, compared to traditional image classification backbones, such as ResNet, the proposed ViewNet can extract more distinguishing features from multiple views of a point cloud. We also show that ViewNet can be used as a backbone with different FSL heads and provides improved performance compared to traditionally used backbones.