PEAL: Prior-Embedded Explicit Attention Learning for Low-Overlap Point Cloud Registration
{kind=link}
Abstract
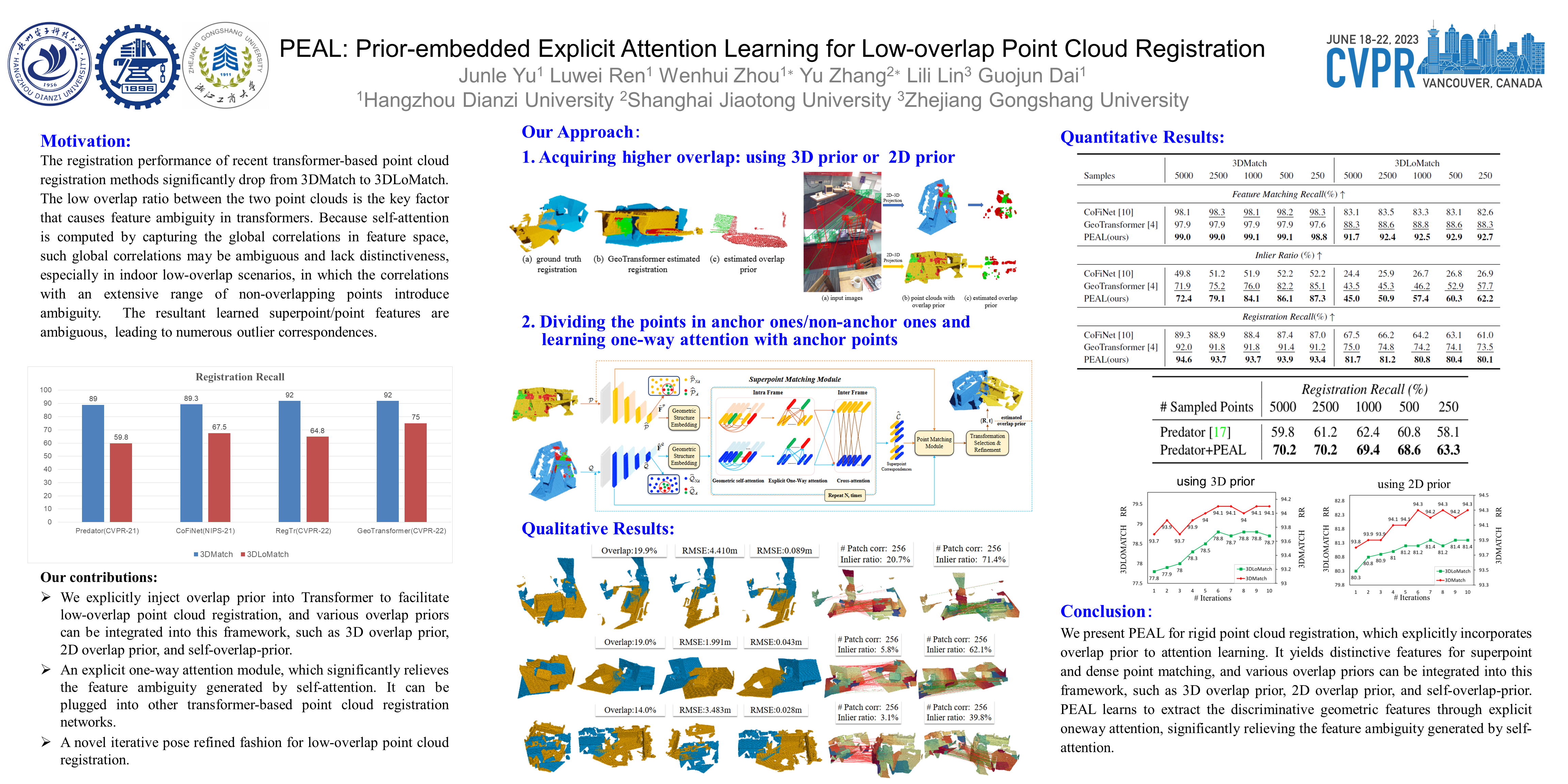
Learning distinctive point-wise features is critical for low-overlap point cloud registration. Recently, it has achieved huge success in incorporating Transformer into point cloud feature representation, which usually adopts a self-attention module to learn intra-point-cloud features first, then utilizes a cross-attention module to perform feature exchange between input point clouds. Self-attention is computed by capturing the global dependency in geometric space. However, this global dependency can be ambiguous and lacks distinctiveness, especially in indoor low-overlap scenarios, as which the dependence with an extensive range of non-overlapping points introduces ambiguity. To address this issue, we present PEAL, a Prior-embedded Explicit Attention Learning model. By incorporating prior knowledge into the learning process, the points are divided into two parts. One includes points lying in the putative overlapping region and the other includes points lying in the putative non-overlapping region. Then PEAL explicitly learns one-way attention with the putative overlapping points. This simplistic design attains surprising performance, significantly relieving the aforementioned feature ambiguity. Our method improves the Registration Recall by 6+% on the challenging 3DLoMatch benchmark and achieves state-of-the-art performance on Feature Matching Recall, Inlier Ratio, and Registration Recall on both 3DMatch and 3DLoMatch. Code will be made publicly available.