Revisiting the P3P Problem
{kind=link}
Abstract
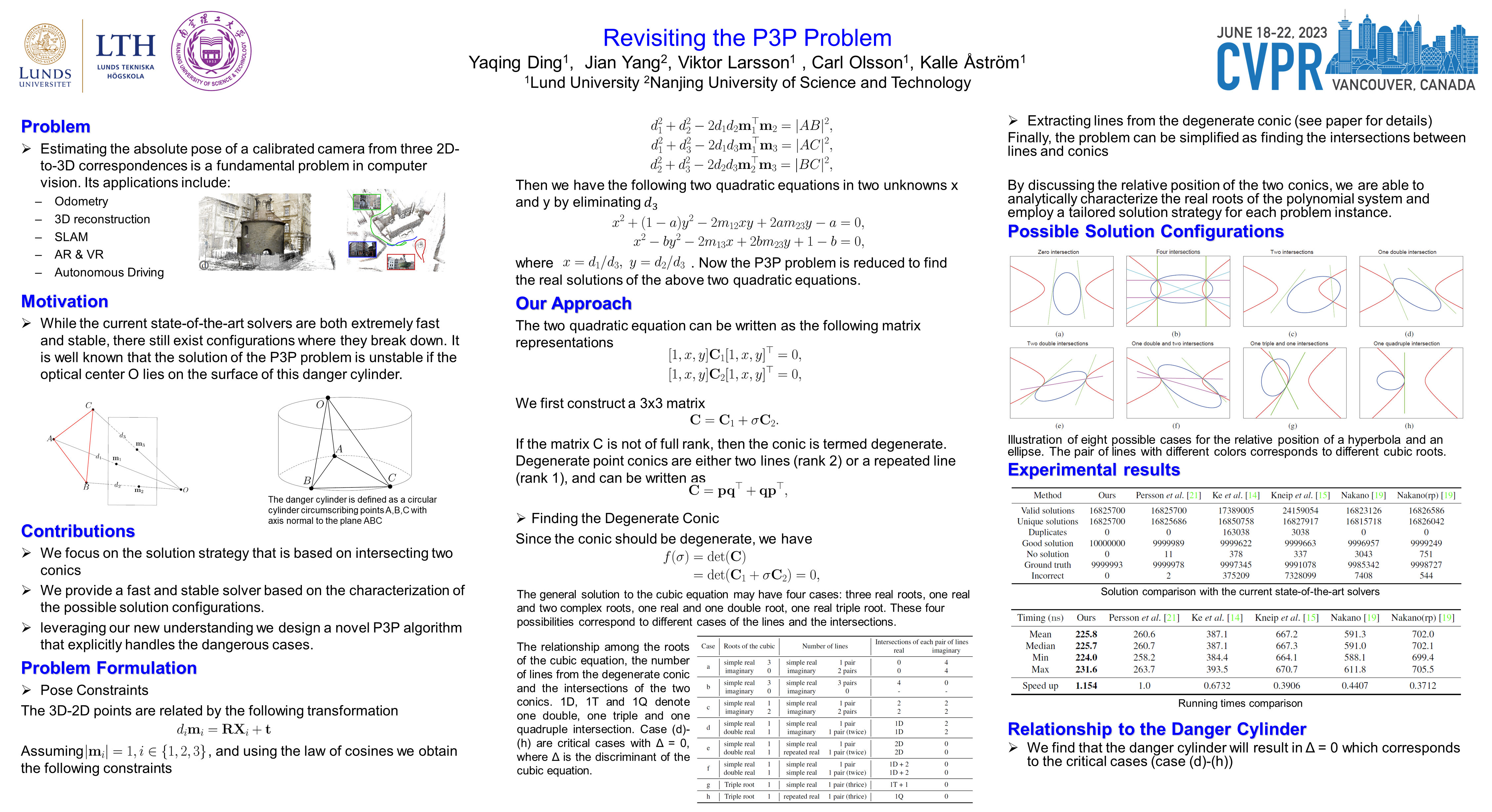
One of the classical multi-view geometry problems is the so called P3P problem, where the absolute pose of a calibrated camera is determined from three 2D-to-3D correspondences. Since these solvers form a critical component of many vision systems (e.g.~in localization and Structure-from-Motion), there have been significant effort in developing faster and more stable algorithms. While the current state-of-the-art solvers are both extremely fast and stable, there still exist configurations where they break down. In this paper we algebraically formulate the problem as finding the intersection of two conics. With this formulation we are able to analytically characterize the real roots of the polynomial system and employ a tailored solution strategy for each problem instance. The result is a fast and completely stable solver, that is able to correctly solve cases where competing methods fail. Our experimental evaluation shows that we outperform the current state-of-the-art methods both in terms of speed and success rate.