Analyzing and Diagnosing Pose Estimation With Attributions
{kind=link}
Abstract
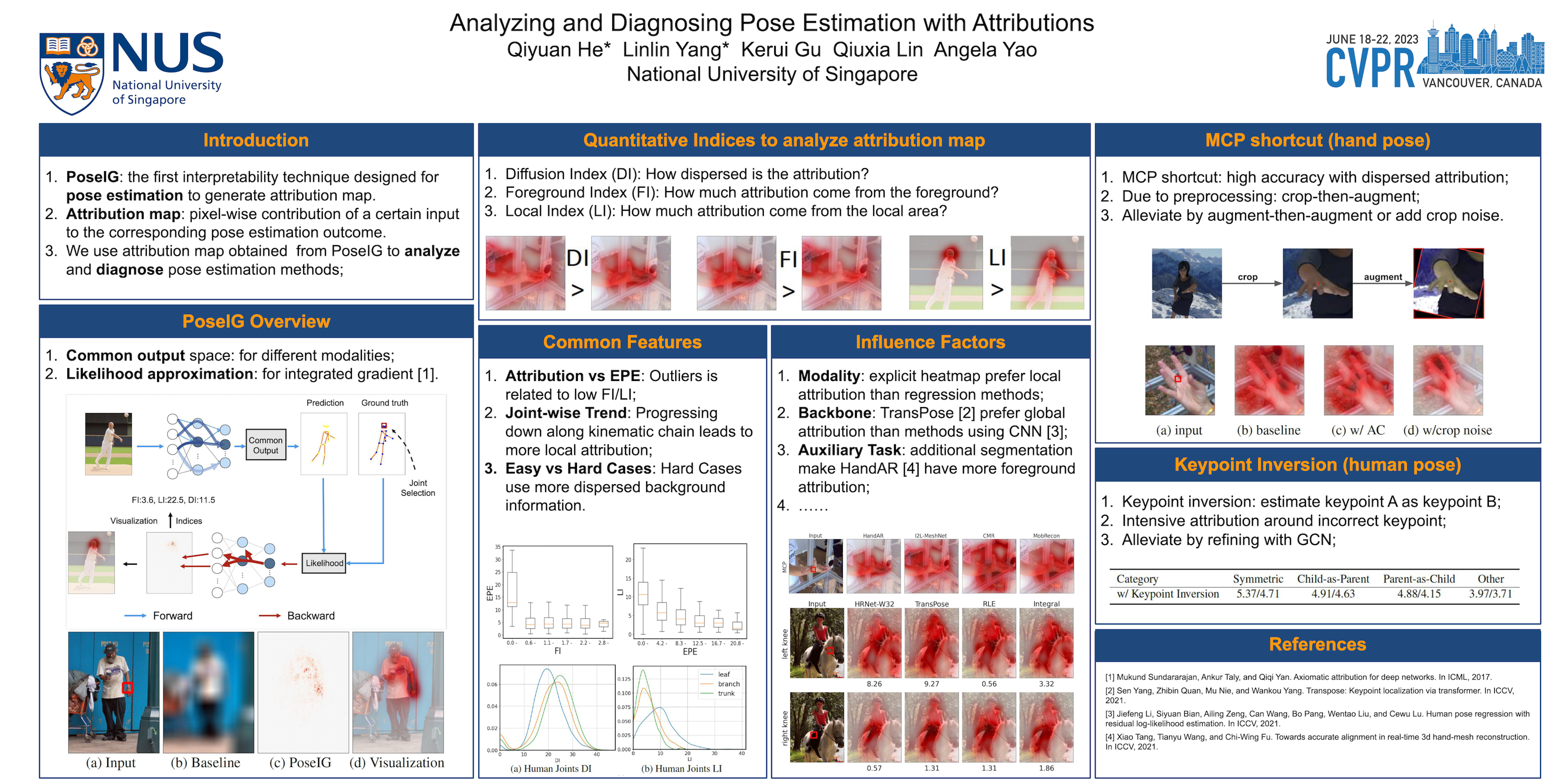
We present Pose Integrated Gradient (PoseIG), the first interpretability technique designed for pose estimation. We extend the concept of integrated gradients for pose estimation to generate pixel-level attribution maps. To enable comparison across different pose frameworks, we unify different pose outputs into a common output space, along with a likelihood approximation function for gradient back-propagation. To complement the qualitative insight from the attribution maps, we propose three indices for quantitative analysis. With these tools, we systematically compare different pose estimation frameworks to understand the impacts of network design, backbone and auxiliary tasks. Our analysis reveals an interesting shortcut of the knuckles (MCP joints) for hand pose estimation and an under-explored inversion error for keypoints in body pose estimation. Project page: https://qy-h00.github.io/poseig/.