DeepMapping2: Self-Supervised Large-Scale LiDAR Map Optimization
{kind=link}
Abstract
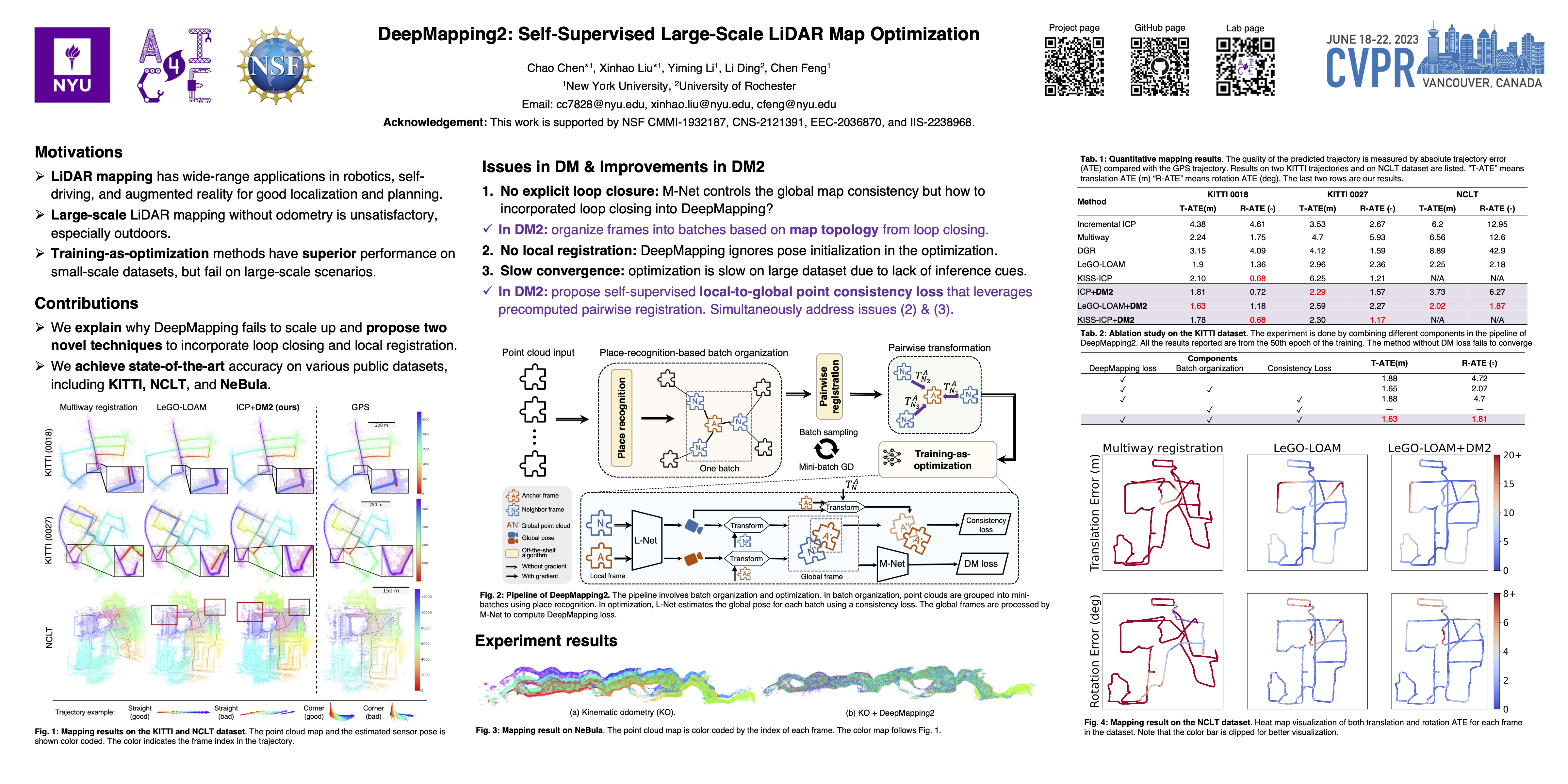
LiDAR mapping is important yet challenging in self-driving and mobile robotics. To tackle such a global point cloud registration problem, DeepMapping converts the complex map estimation into a self-supervised training of simple deep networks. Despite its broad convergence range on small datasets, DeepMapping still cannot produce satisfactory results on large-scale datasets with thousands of frames. This is due to the lack of loop closures and exact cross-frame point correspondences, and the slow convergence of its global localization network. We propose DeepMapping2 by adding two novel techniques to address these issues: (1) organization of training batch based on map topology from loop closing, and (2) self-supervised local-to-global point consistency loss leveraging pairwise registration. Our experiments and ablation studies on public datasets such as KITTI, NCLT, and Nebula, demonstrate the effectiveness of our method.