BITE: Beyond Priors for Improved Three-D Dog Pose Estimation
{kind=link}
Abstract
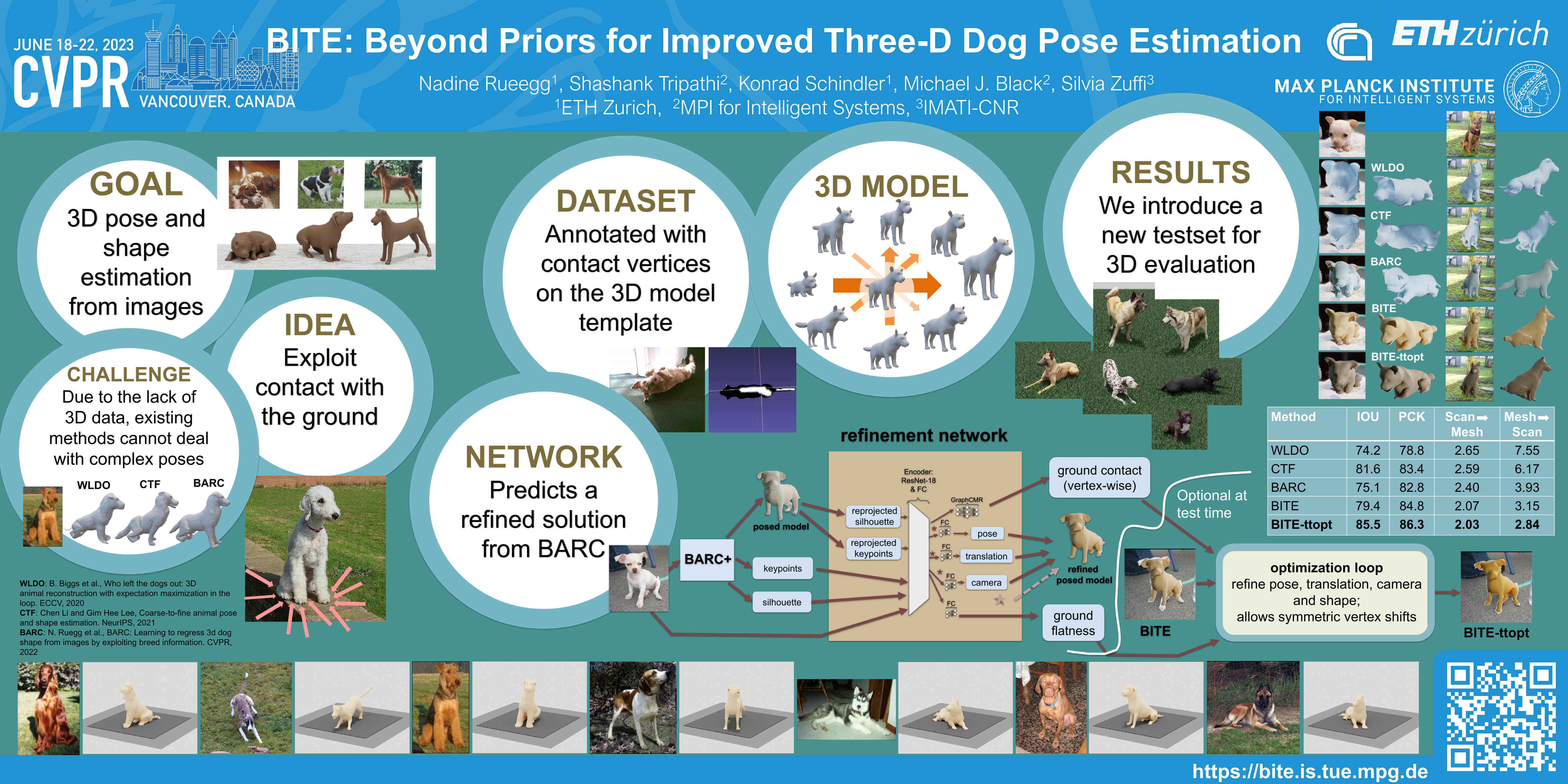
We address the problem of inferring the 3D shape and pose of dogs from images. Given the lack of 3D training data, this problem is challenging, and the best methods lag behind those designed to estimate human shape and pose. To make progress, we attack the problem from multiple sides at once. First, we need a good 3D shape prior, like those available for humans. To that end, we learn a dog-specific 3D parametric model, called D-SMAL. Second, existing methods focus on dogs in standing poses because when they sit or lie down, their legs are self occluded and their bodies deform. Without access to a good pose prior or 3D data, we need an alternative approach. To that end, we exploit contact with the ground as a form of side information. We consider an existing large dataset of dog images and label any 3D contact of the dog with the ground. We exploit body-ground contact in estimating dog pose and find that it significantly improves results. Third, we develop a novel neural network architecture to infer and exploit this contact information. Fourth, to make progress, we have to be able to measure it. Current evaluation metrics are based on 2D features like keypoints and silhouettes, which do not directly correlate with 3D errors. To address this, we create a synthetic dataset containing rendered images of scanned 3D dogs. With these advances, our method recovers significantly better dog shape and pose than the state of the art, and we evaluate this improvement in 3D. Our code, model and test dataset are publicly available for research purposes at https://bite.is.tue.mpg.de.