NeRF in the Palm of Your Hand: Corrective Augmentation for Robotics via Novel-View Synthesis
{kind=link}
Abstract
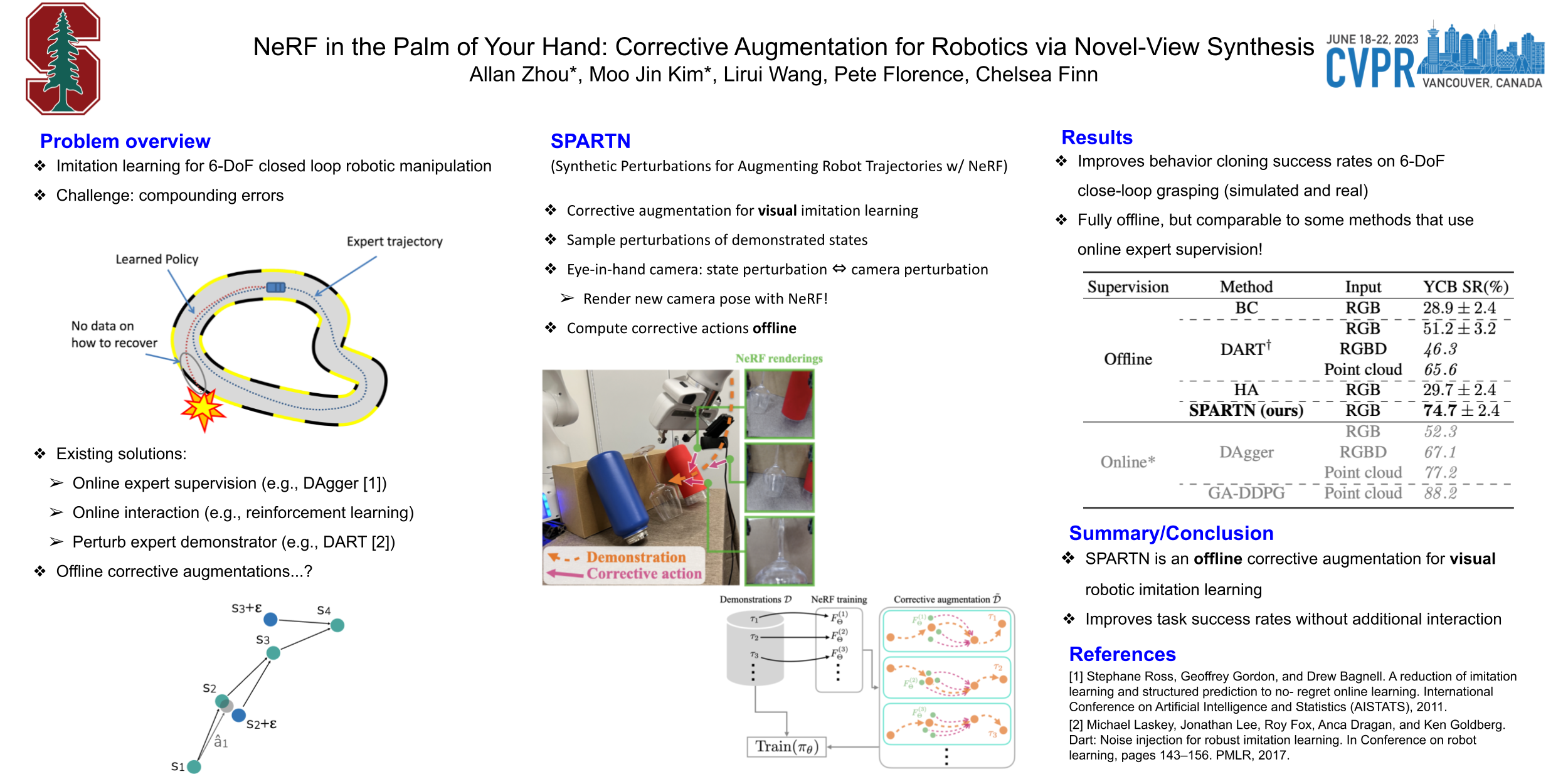
Expert demonstrations are a rich source of supervision for training visual robotic manipulation policies, but imitation learning methods often require either a large number of demonstrations or expensive online expert supervision to learn reactive closed-loop behaviors. In this work, we introduce SPARTN (Synthetic Perturbations for Augmenting Robot Trajectories via NeRF): a fully-offline data augmentation scheme for improving robot policies that use eye-in-hand cameras. Our approach leverages neural radiance fields (NeRFs) to synthetically inject corrective noise into visual demonstrations: using NeRFs to generate perturbed viewpoints while simultaneously calculating the corrective actions. This requires no additional expert supervision or environment interaction, and distills the geometric information in NeRFs into a real-time reactive RGB-only policy. In a simulated 6-DoF visual grasping benchmark, SPARTN improves offline success rates by 2.8× over imitation learning without the corrective augmentations and even outperforms some methods that use online supervision. It additionally closes the gap between RGB-only and RGB-D success rates, eliminating the previous need for depth sensors. In real-world 6-DoF robotic grasping experiments from limited human demonstrations, our method improves absolute success rates by 22.5% on average, including objects that are traditionally challenging for depth-based methods.