Localized Semantic Feature Mixers for Efficient Pedestrian Detection in Autonomous Driving
{kind=link}
Abstract
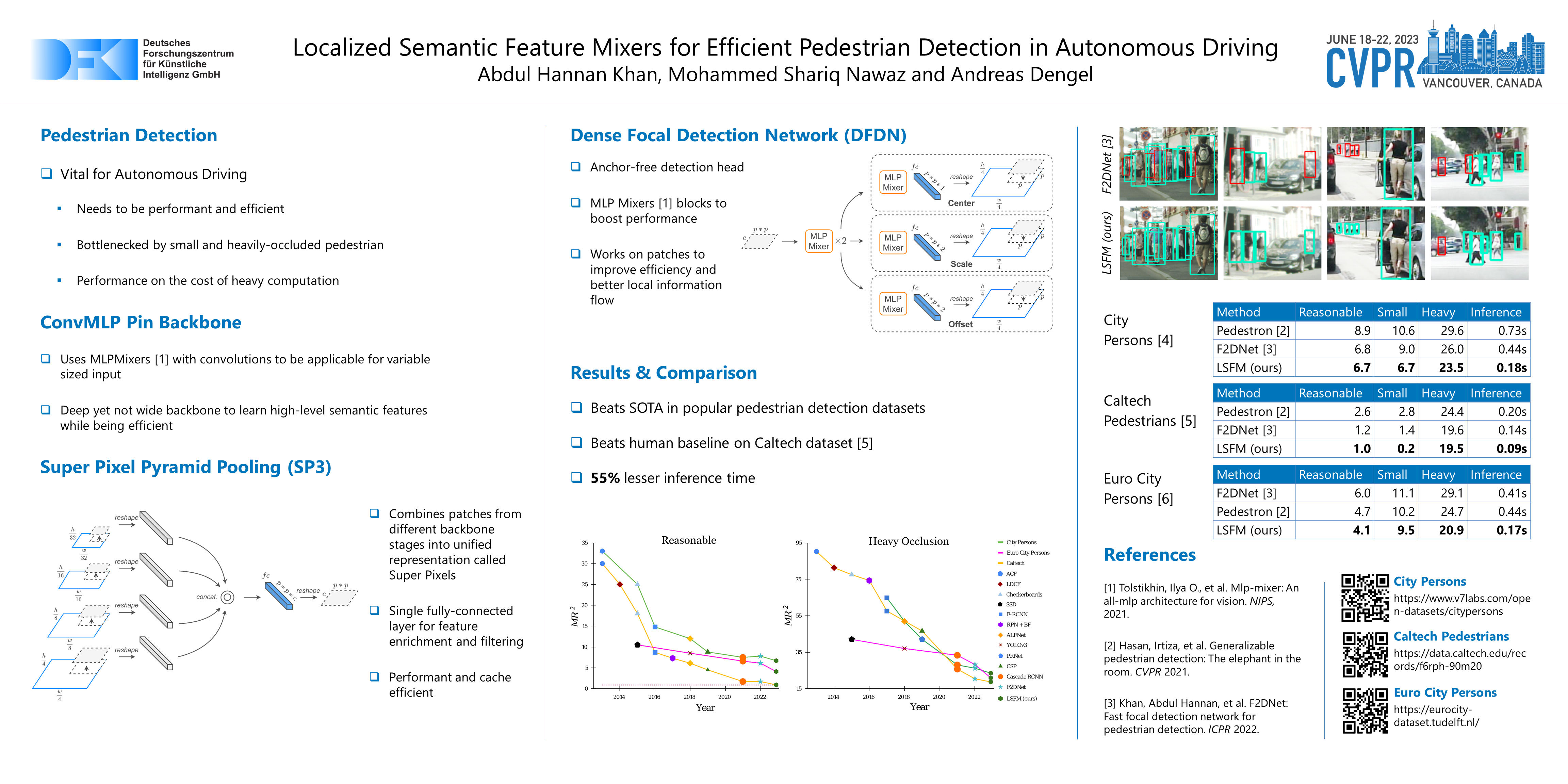
Autonomous driving systems rely heavily on the underlying perception module which needs to be both performant and efficient to allow precise decisions in real-time. Avoiding collisions with pedestrians is of topmost priority in any autonomous driving system. Therefore, pedestrian detection is one of the core parts of such systems’ perception modules. Current state-of-the-art pedestrian detectors have two major issues. Firstly, they have long inference times which affect the efficiency of the whole perception module, and secondly, their performance in the case of small and heavily occluded pedestrians is poor. We propose Localized Semantic Feature Mixers (LSFM), a novel, anchor-free pedestrian detection architecture. It uses our novel Super Pixel Pyramid Pooling module instead of the, computationally costly, Feature Pyramid Networks for feature encoding. Moreover, our MLPMixer-based Dense Focal Detection Network is used as a light detection head, reducing computational effort and inference time compared to existing approaches. To boost the performance of the proposed architecture, we adapt and use mixup augmentation which improves the performance, especially in small and heavily occluded cases. We benchmark LSFM against the state-of-the-art on well-established traffic scene pedestrian datasets. The proposed LSFM achieves state-of-the-art performance in Caltech, City Persons, Euro City Persons, and TJU-Traffic-Pedestrian datasets while reducing the inference time on average by 55%. Further, LSFM beats the human baseline for the first time in the history of pedestrian detection. Finally, we conducted a cross-dataset evaluation which proved that our proposed LSFM generalizes well to unseen data.