Collaboration Helps Camera Overtake LiDAR in 3D Detection
{kind=link}
Abstract
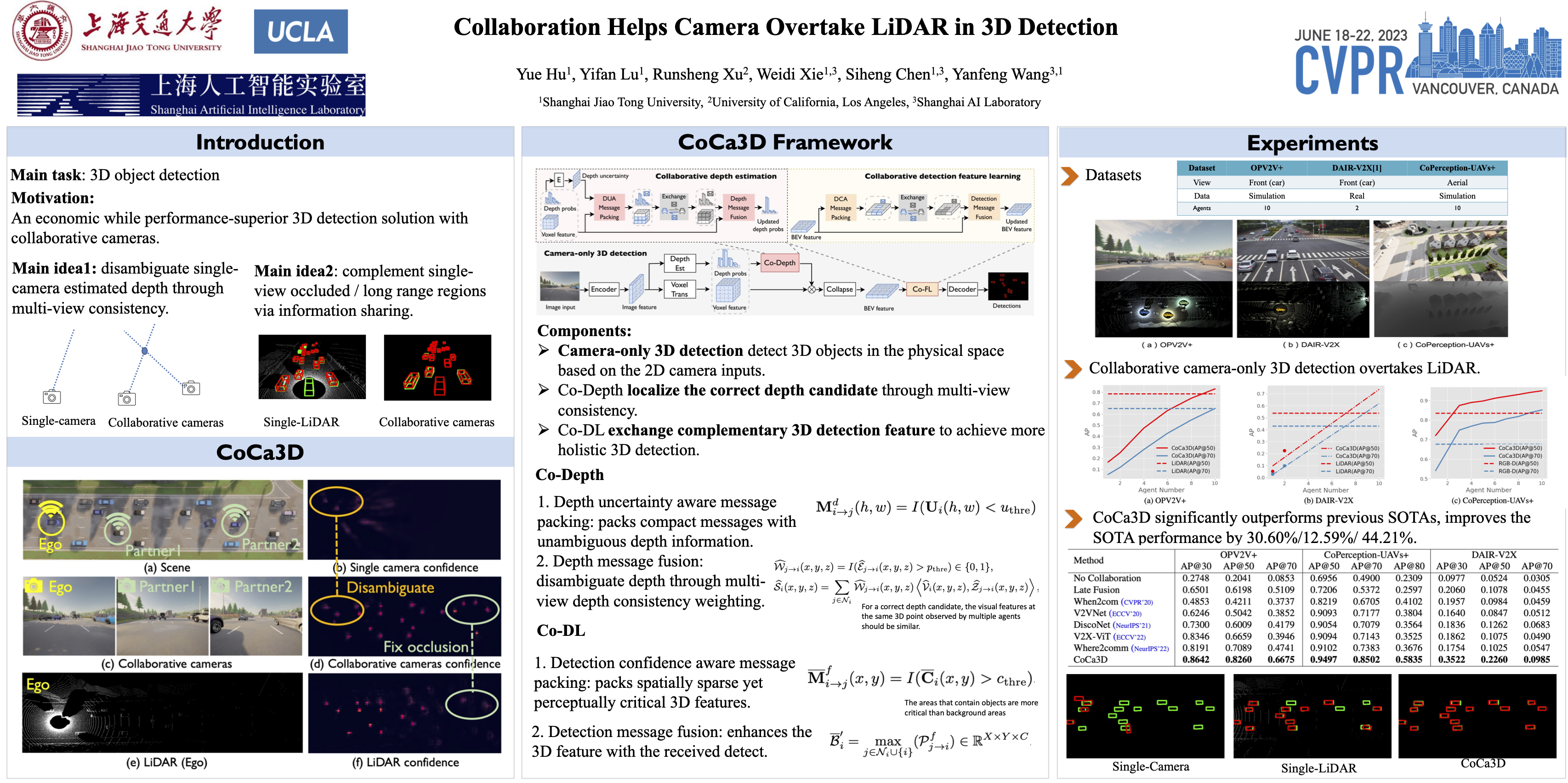
Camera-only 3D detection provides an economical solution with a simple configuration for localizing objects in 3D space compared to LiDAR-based detection systems. However, a major challenge lies in precise depth estimation due to the lack of direct 3D measurements in the input. Many previous methods attempt to improve depth estimation through network designs, e.g., deformable layers and larger receptive fields. This work proposes an orthogonal direction, improving the camera-only 3D detection by introducing multi-agent collaborations. Our proposed collaborative camera-only 3D detection (CoCa3D) enables agents to share complementary information with each other through communication. Meanwhile, we optimize communication efficiency by selecting the most informative cues. The shared messages from multiple viewpoints disambiguate the single-agent estimated depth and complement the occluded and long-range regions in the single-agent view. We evaluate CoCa3D in one real-world dataset and two new simulation datasets. Results show that CoCa3D improves previous SOTA performances by 44.21% on DAIR-V2X, 30.60% on OPV2V+, 12.59% on CoPerception-UAVs+ for AP@70. Our preliminary results show a potential that with sufficient collaboration, the camera might overtake LiDAR in some practical scenarios. We released the dataset and code at https://siheng-chen.github.io/dataset/CoPerception+ and https://github.com/MediaBrain-SJTU/CoCa3D.