Temporal Consistent 3D LiDAR Representation Learning for Semantic Perception in Autonomous Driving
{kind=link}
Abstract
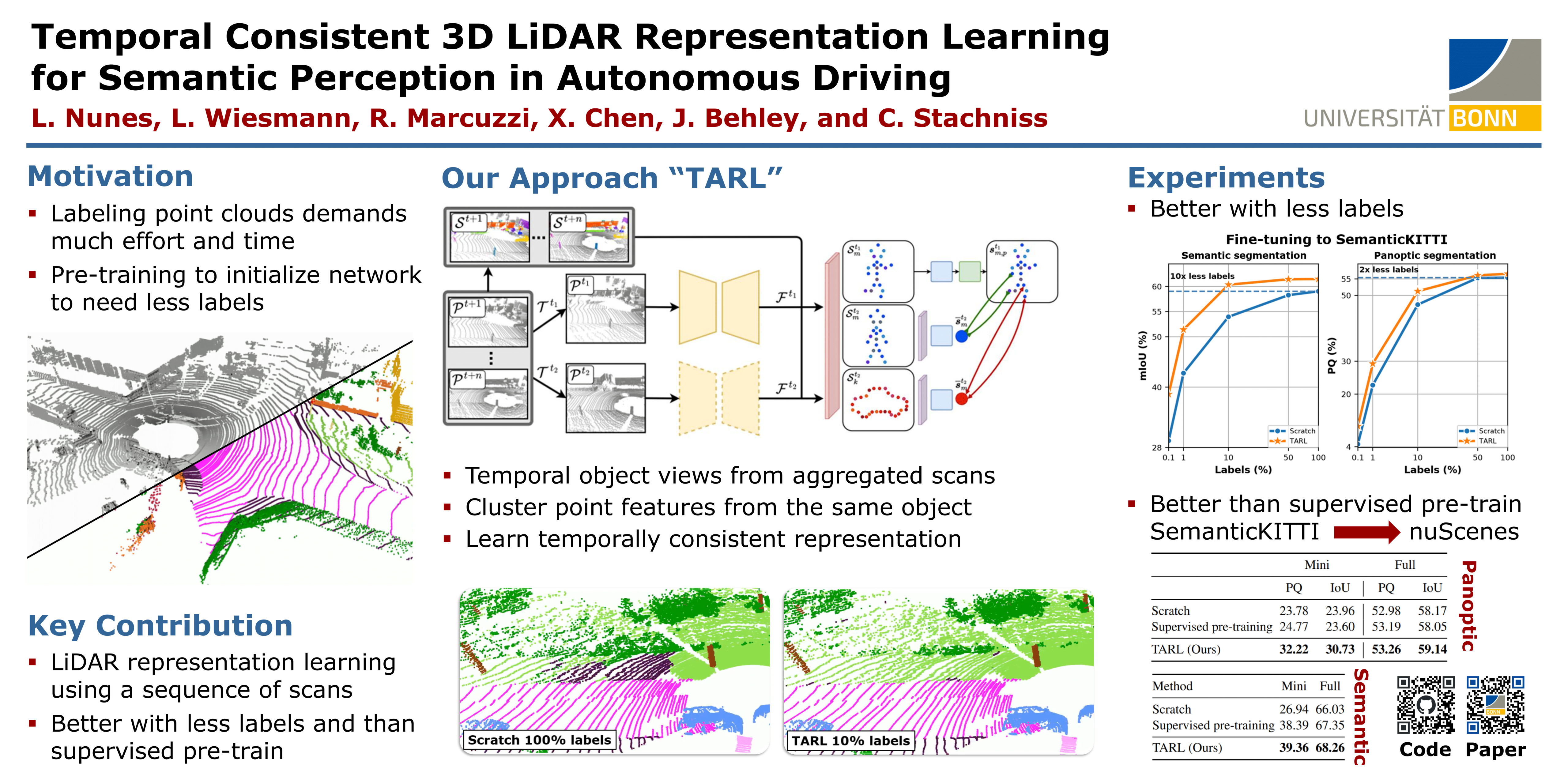
Semantic perception is a core building block in autonomous driving, since it provides information about the drivable space and location of other traffic participants. For learning-based perception, often a large amount of diverse training data is necessary to achieve high performance. Data labeling is usually a bottleneck for developing such methods, especially for dense prediction tasks, e.g., semantic segmentation or panoptic segmentation. For 3D LiDAR data, the annotation process demands even more effort than for images. Especially in autonomous driving, point clouds are sparse, and objects appearance depends on its distance from the sensor, making it harder to acquire large amounts of labeled training data. This paper aims at taking an alternative path proposing a self-supervised representation learning method for 3D LiDAR data. Our approach exploits the vehicle motion to match objects across time viewed in different scans. We then train a model to maximize the point-wise feature similarities from points of the associated object in different scans, which enables to learn a consistent representation across time. The experimental results show that our approach performs better than previous state-of-the-art self-supervised representation learning methods when fine-tuning to different downstream tasks. We furthermore show that with only 10% of labeled data, a network pre-trained with our approach can achieve better performance than the same network trained from scratch with all labels for semantic segmentation on SemanticKITTI.