PointVector: A Vector Representation in Point Cloud Analysis
{kind=link}
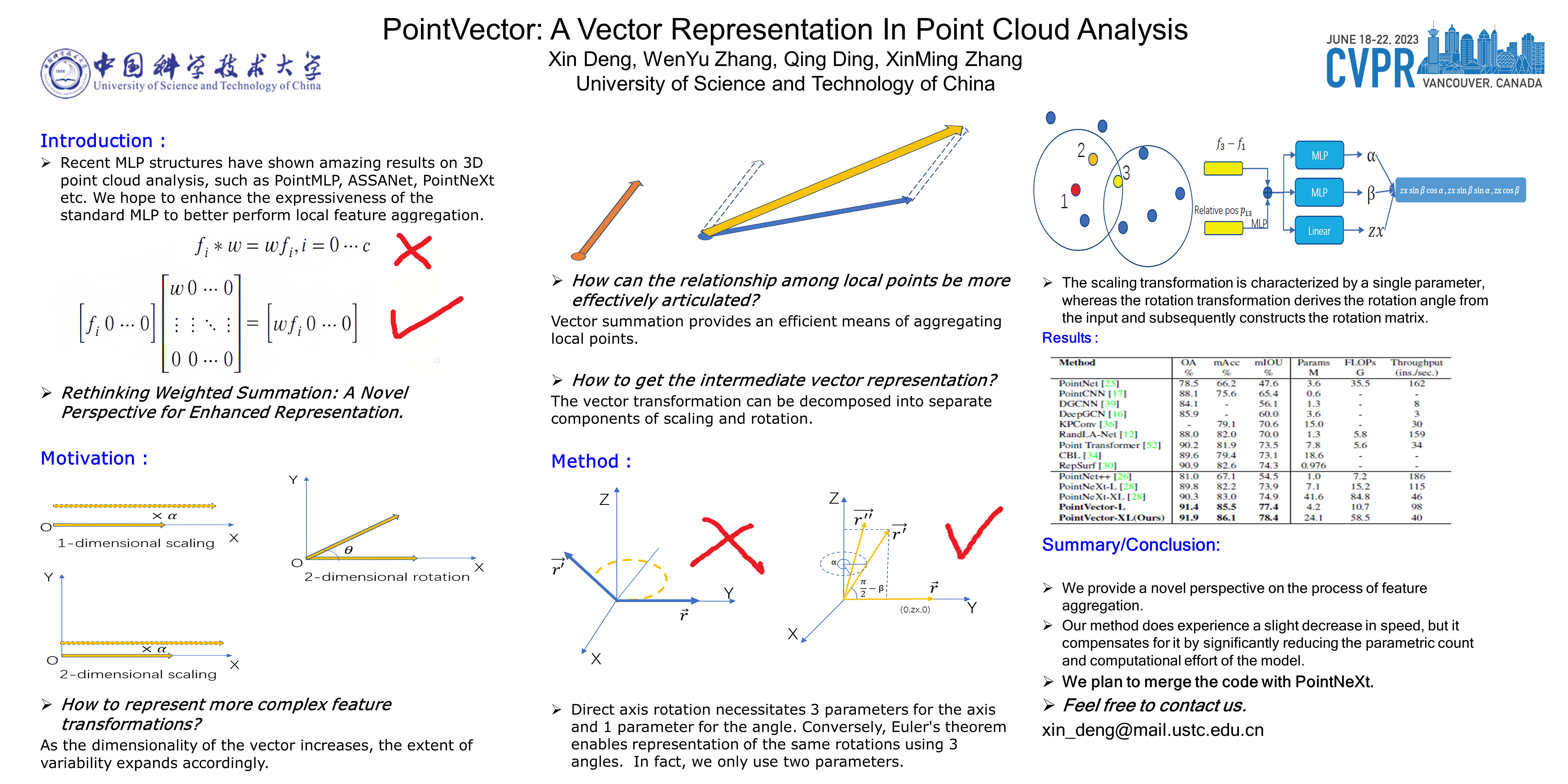
Abstract
In point cloud analysis, point-based methods have rapidly developed in recent years. These methods have recently focused on concise MLP structures, such as PointNeXt, which have demonstrated competitiveness with Convolutional and Transformer structures. However, standard MLPs are limited in their ability to extract local features effectively. To address this limitation, we propose a Vector-oriented Point Set Abstraction that can aggregate neighboring features through higher-dimensional vectors. To facilitate network optimization, we construct a transformation from scalar to vector using independent angles based on 3D vector rotations. Finally, we develop a PointVector model that follows the structure of PointNeXt. Our experimental results demonstrate that PointVector achieves state-of-the-art performance 72.3% mIOU on the S3DIS Area 5 and 78.4% mIOU on the S3DIS (6-fold cross-validation) with only 58% model parameters of PointNeXt. We hope our work will help the exploration of concise and effective feature representations. The code will be released soon.