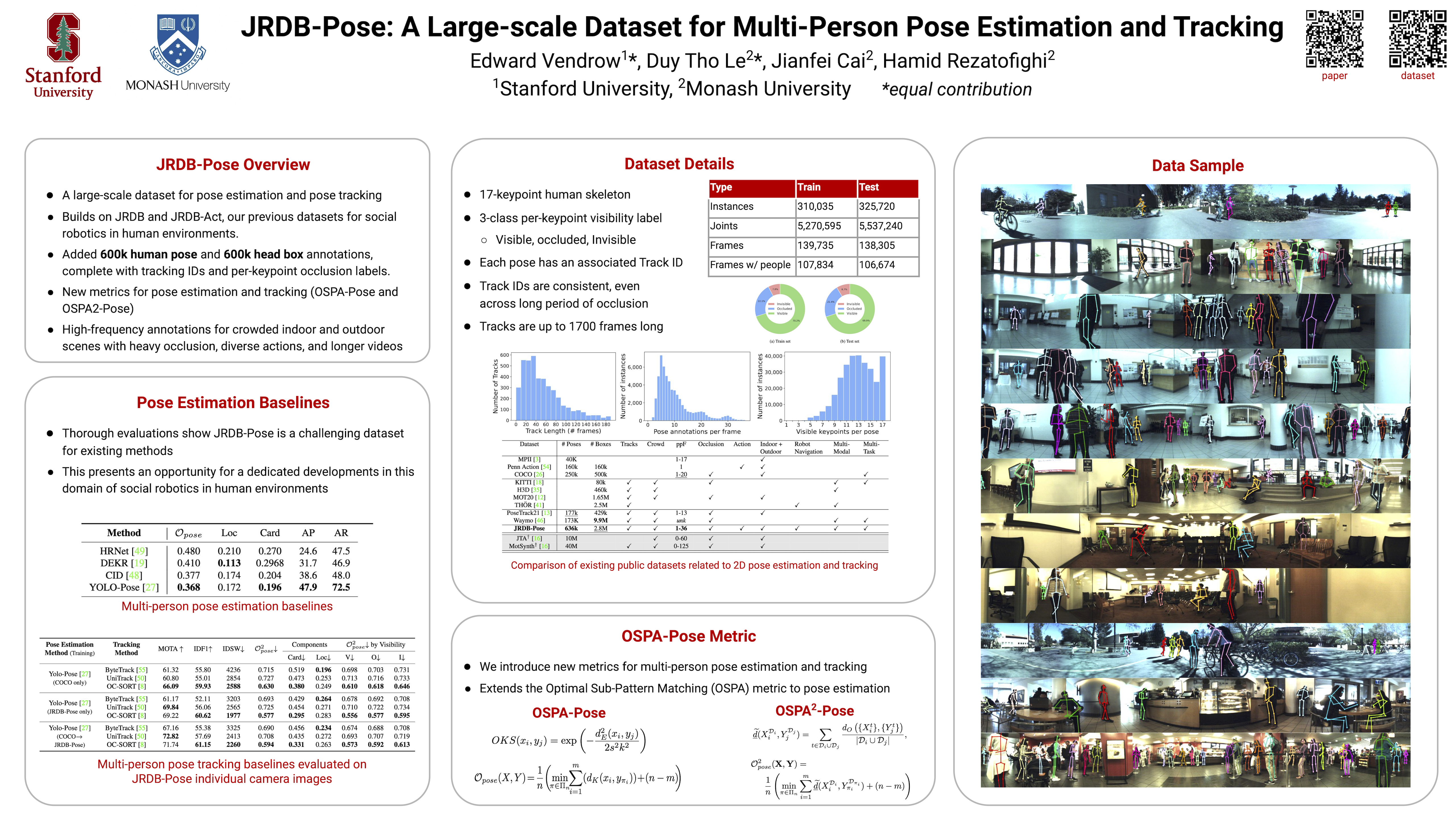
JRDB-Pose: A Large-Scale Dataset for Multi-Person Pose Estimation and Tracking
{kind=link}
Abstract
Autonomous robotic systems operating in human environments must understand their surroundings to make accurate and safe decisions. In crowded human scenes with close-up human-robot interaction and robot navigation, a deep understanding of surrounding people requires reasoning about human motion and body dynamics over time with human body pose estimation and tracking. However, existing datasets captured from robot platforms either do not provide pose annotations or do not reflect the scene distribution of social robots. In this paper, we introduce JRDB-Pose, a large-scale dataset and benchmark for multi-person pose estimation and tracking. JRDB-Pose extends the existing JRDB which includes videos captured from a social navigation robot in a university campus environment, containing challenging scenes with crowded indoor and outdoor locations and a diverse range of scales and occlusion types. JRDB-Pose provides human pose annotations with per-keypoint occlusion labels and track IDs consistent across the scene and with existing annotations in JRDB. We conduct a thorough experimental study of state-of-the-art multi-person pose estimation and tracking methods on JRDB-Pose, showing that our dataset imposes new challenges for the existing methods. JRDB-Pose is available at https://jrdb.erc.monash.edu/.