Leveraging Hidden Positives for Unsupervised Semantic Segmentation
{kind=link}
Abstract
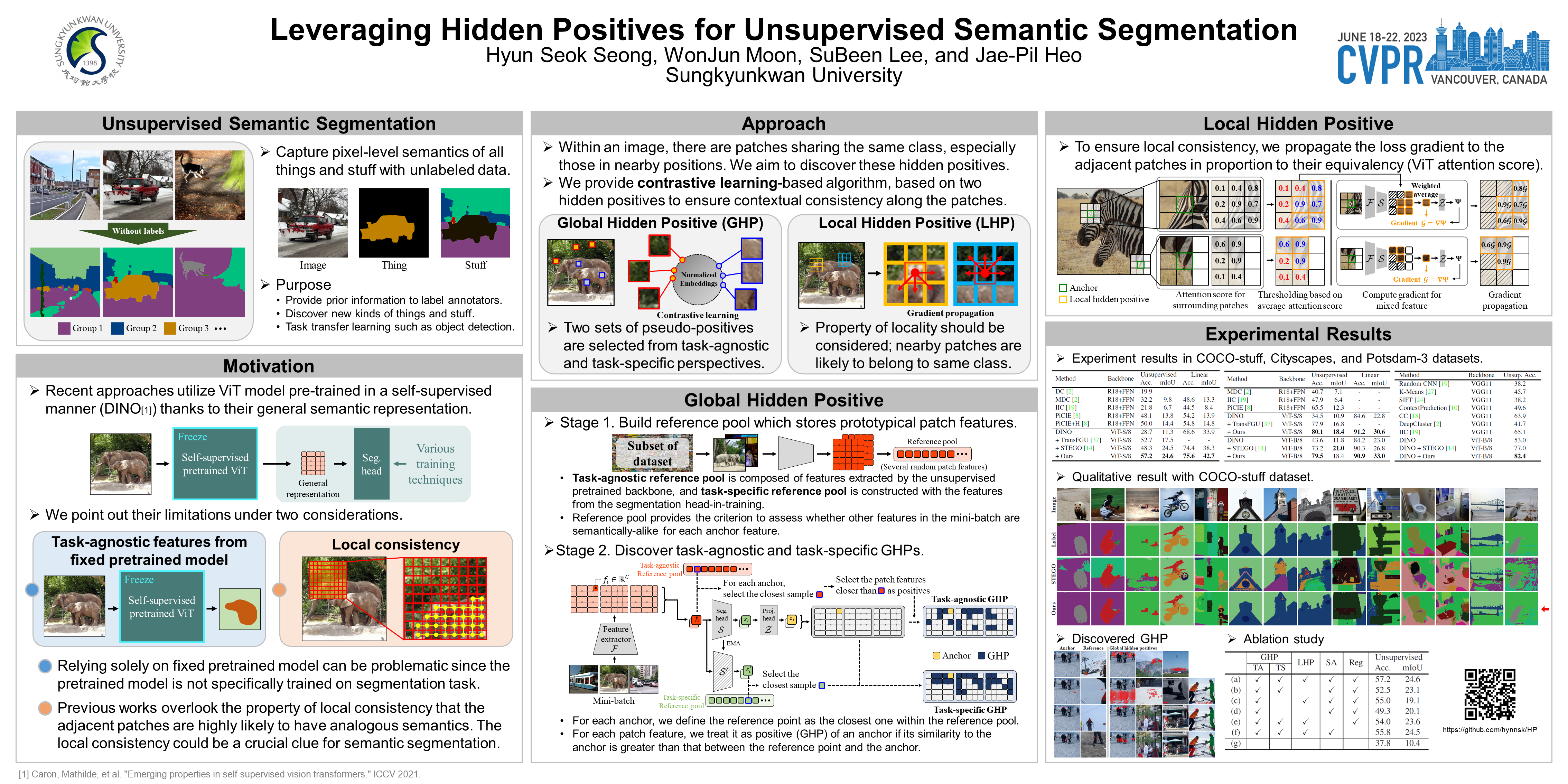
Dramatic demand for manpower to label pixel-level annotations triggered the advent of unsupervised semantic segmentation. Although the recent work employing the vision transformer (ViT) backbone shows exceptional performance, there is still a lack of consideration for task-specific training guidance and local semantic consistency. To tackle these issues, we leverage contrastive learning by excavating hidden positives to learn rich semantic relationships and ensure semantic consistency in local regions. Specifically, we first discover two types of global hidden positives, task-agnostic and task-specific ones for each anchor based on the feature similarities defined by a fixed pre-trained backbone and a segmentation head-in-training, respectively. A gradual increase in the contribution of the latter induces the model to capture task-specific semantic features. In addition, we introduce a gradient propagation strategy to learn semantic consistency between adjacent patches, under the inherent premise that nearby patches are highly likely to possess the same semantics. Specifically, we add the loss propagating to local hidden positives, semantically similar nearby patches, in proportion to the predefined similarity scores. With these training schemes, our proposed method achieves new state-of-the-art (SOTA) results in COCO-stuff, Cityscapes, and Potsdam-3 datasets. Our code is available at: https://github.com/hynnsk/HP.