PLIKS: A Pseudo-Linear Inverse Kinematic Solver for 3D Human Body Estimation
 Highlight
Highlight
{kind=link}
Abstract
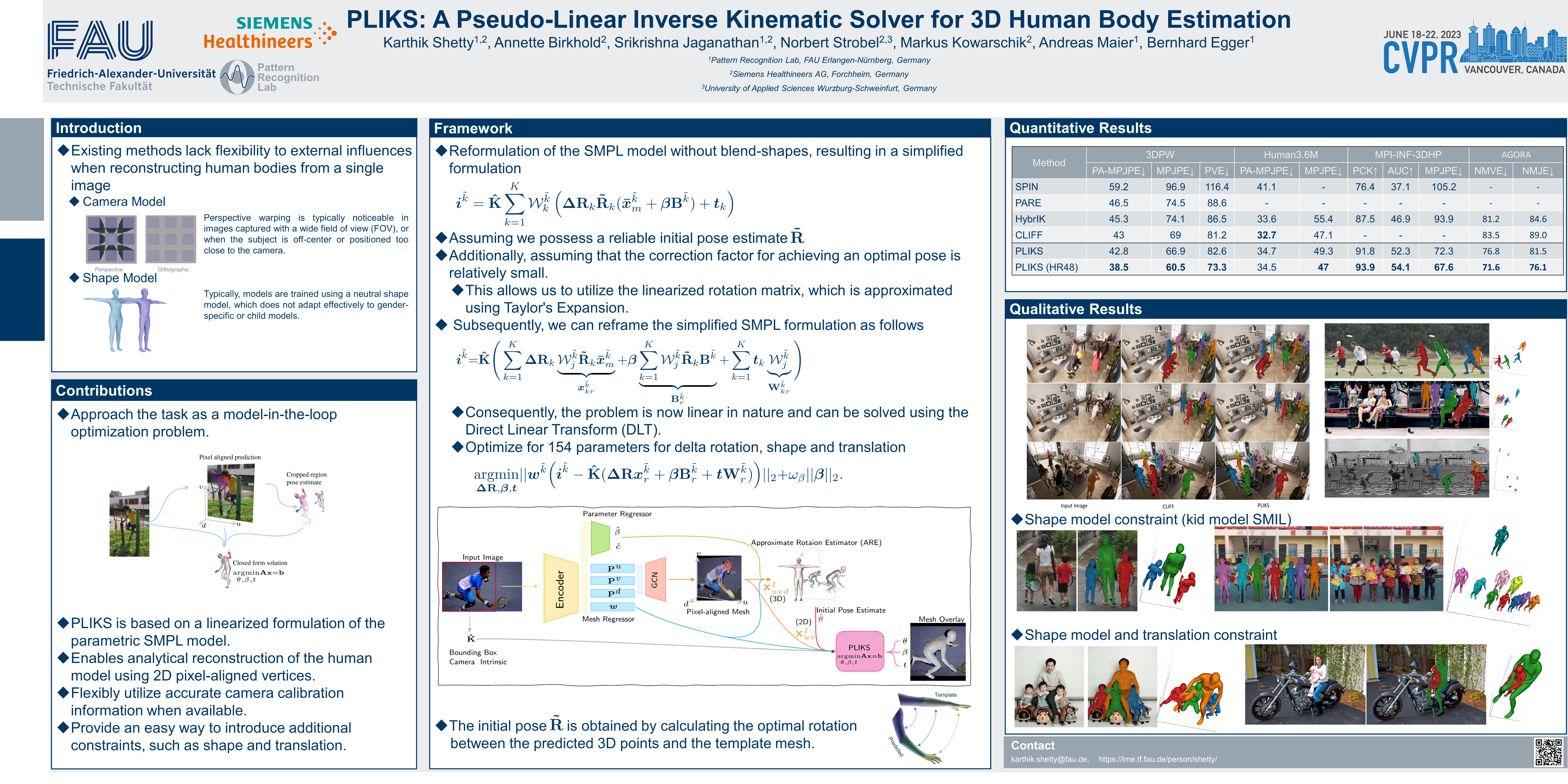
We introduce PLIKS (Pseudo-Linear Inverse Kinematic Solver) for reconstruction of a 3D mesh of the human body from a single 2D image. Current techniques directly regress the shape, pose, and translation of a parametric model from an input image through a non-linear mapping with minimal flexibility to any external influences. We approach the task as a model-in-the-loop optimization problem. PLIKS is built on a linearized formulation of the parametric SMPL model. Using PLIKS, we can analytically reconstruct the human model via 2D pixel-aligned vertices. This enables us with the flexibility to use accurate camera calibration information when available. PLIKS offers an easy way to introduce additional constraints such as shape and translation. We present quantitative evaluations which confirm that PLIKS achieves more accurate reconstruction with greater than 10% improvement compared to other state-of-the-art methods with respect to the standard 3D human pose and shape benchmarks while also obtaining a reconstruction error improvement of 12.9 mm on the newer AGORA dataset.