ObjectMatch: Robust Registration Using Canonical Object Correspondences
{kind=link}
Abstract
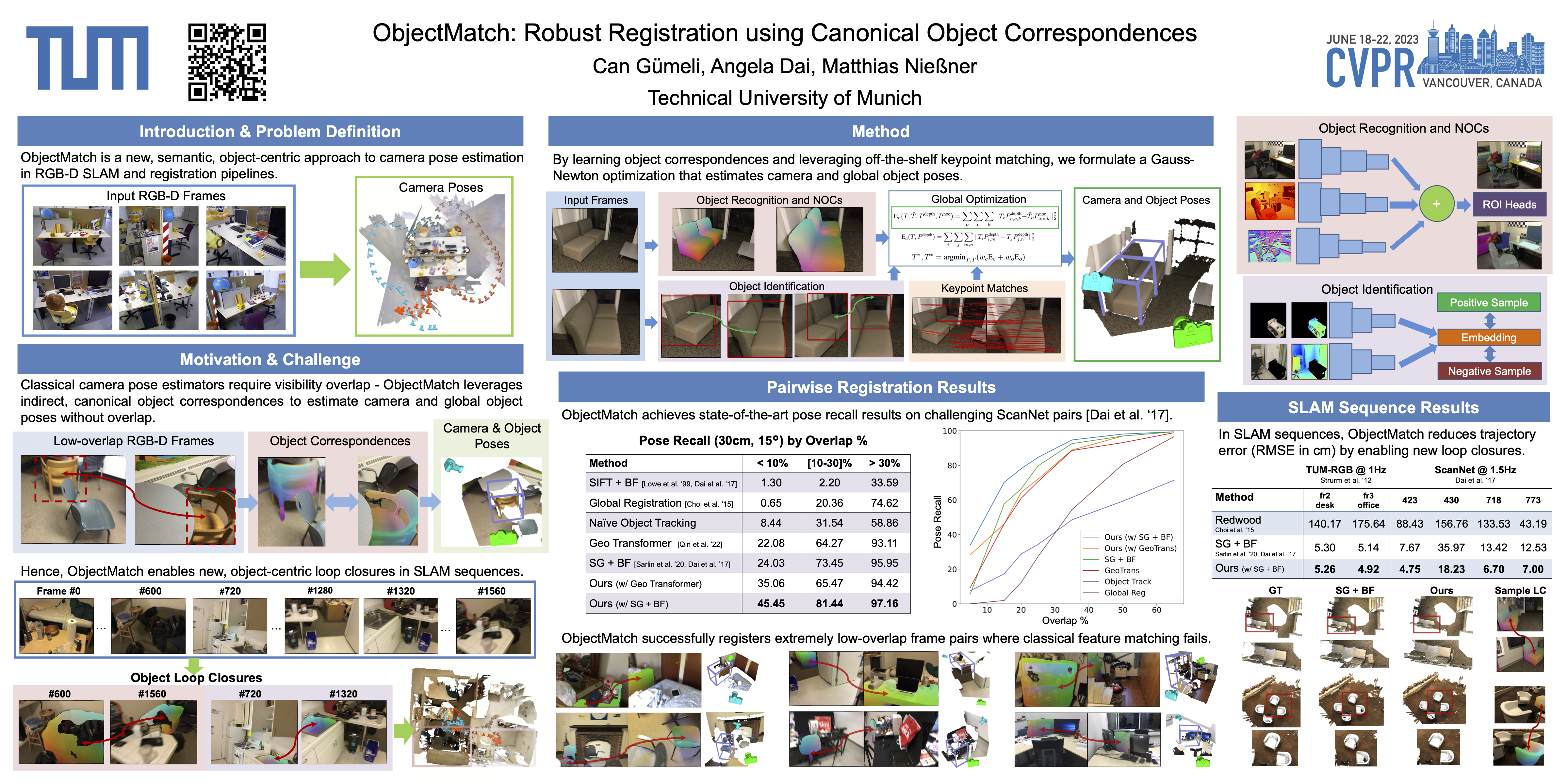
We present ObjectMatch, a semantic and object-centric camera pose estimator for RGB-D SLAM pipelines. Modern camera pose estimators rely on direct correspondences of overlapping regions between frames; however, they cannot align camera frames with little or no overlap. In this work, we propose to leverage indirect correspondences obtained via semantic object identification. For instance, when an object is seen from the front in one frame and from the back in another frame, we can provide additional pose constraints through canonical object correspondences. We first propose a neural network to predict such correspondences on a per-pixel level, which we then combine in our energy formulation with state-of-the-art keypoint matching solved with a joint Gauss-Newton optimization. In a pairwise setting, our method improves registration recall of state-of-the-art feature matching, including from 24% to 45% in pairs with 10% or less inter-frame overlap. In registering RGB-D sequences, our method outperforms cutting-edge SLAM baselines in challenging, low-frame-rate scenarios, achieving more than 35% reduction in trajectory error in multiple scenes.