GeoVLN: Learning Geometry-Enhanced Visual Representation With Slot Attention for Vision-and-Language Navigation
{kind=link}
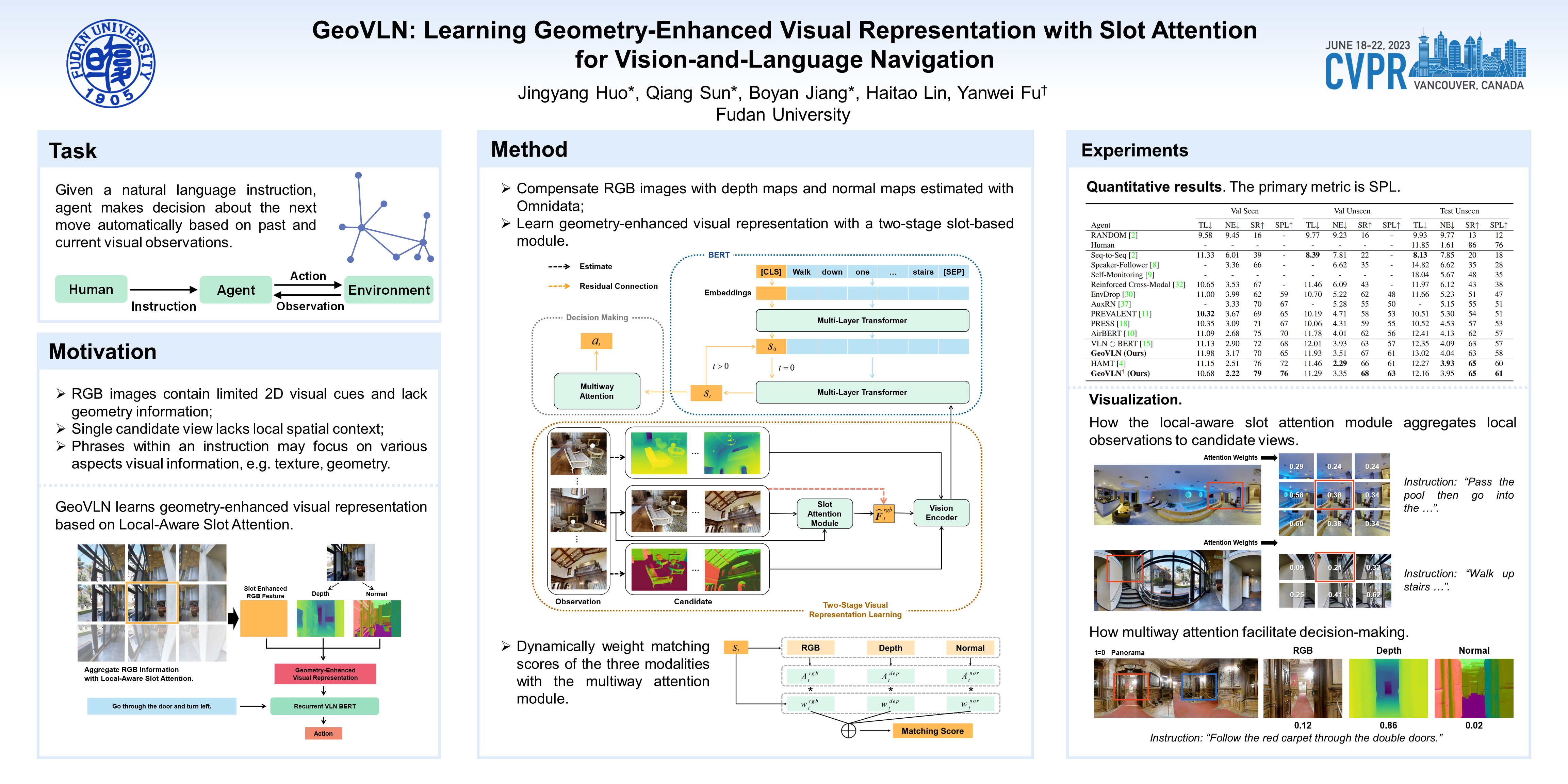
Abstract
Most existing works solving Room-to-Room VLN problem only utilize RGB images and do not consider local context around candidate views, which lack sufficient visual cues about surrounding environment. Moreover, natural language contains complex semantic information thus its correlations with visual inputs are hard to model merely with cross attention. In this paper, we propose GeoVLN, which learns Geometry-enhanced visual representation based on slot attention for robust Visual-and-Language Navigation. The RGB images are compensated with the corresponding depth maps and normal maps predicted by Omnidata as visual inputs. Technically, we introduce a two-stage module that combine local slot attention and CLIP model to produce geometry-enhanced representation from such input. We employ V&L BERT to learn a cross-modal representation that incorporate both language and vision informations. Additionally, a novel multiway attention module is designed, encouraging different phrases of input instruction to exploit the most related features from visual input. Extensive experiments demonstrate the effectiveness of our newly designed modules and show the compelling performance of the proposed method.