Adaptive Sparse Convolutional Networks With Global Context Enhancement for Faster Object Detection on Drone Images
{kind=link}
Abstract
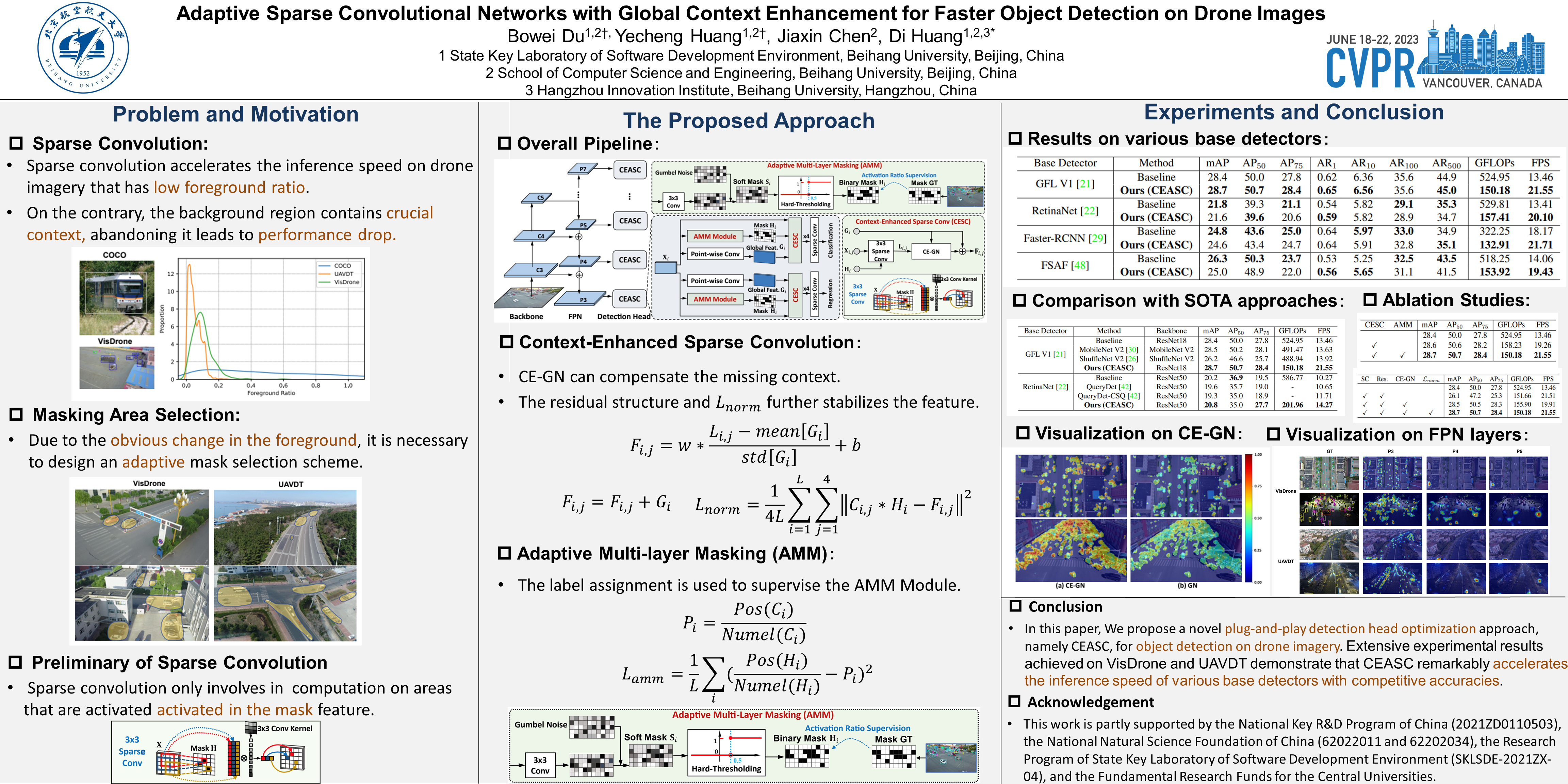
Object detection on drone images with low-latency is an important but challenging task on the resource-constrained unmanned aerial vehicle (UAV) platform. This paper investigates optimizing the detection head based on the sparse convolution, which proves effective in balancing the accuracy and efficiency. Nevertheless, it suffers from inadequate integration of contextual information of tiny objects as well as clumsy control of the mask ratio in the presence of foreground with varying scales. To address the issues above, we propose a novel global context-enhanced adaptive sparse convolutional network (CEASC). It first develops a context-enhanced group normalization (CE-GN) layer, by replacing the statistics based on sparsely sampled features with the global contextual ones, and then designs an adaptive multi-layer masking strategy to generate optimal mask ratios at distinct scales for compact foreground coverage, promoting both the accuracy and efficiency. Extensive experimental results on two major benchmarks, i.e. VisDrone and UAVDT, demonstrate that CEASC remarkably reduces the GFLOPs and accelerates the inference procedure when plugging into the typical state-of-the-art detection frameworks (e.g. RetinaNet and GFL V1) with competitive performance. Code is available at https://github.com/Cuogeihong/CEASC.