ACL-SPC: Adaptive Closed-Loop System for Self-Supervised Point Cloud Completion
{kind=link}
Abstract
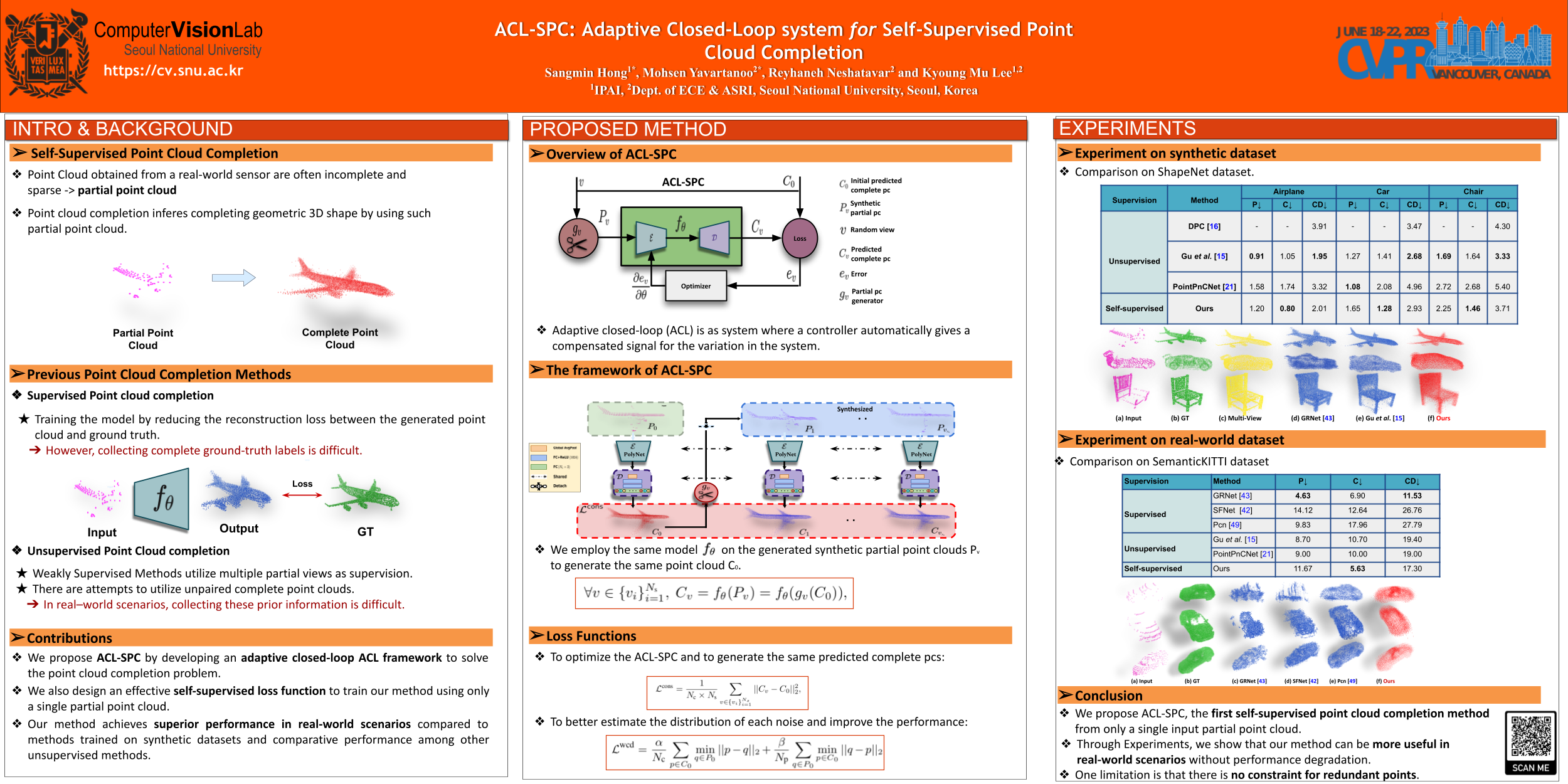
Point cloud completion addresses filling in the missing parts of a partial point cloud obtained from depth sensors and generating a complete point cloud. Although there has been steep progress in the supervised methods on the synthetic point cloud completion task, it is hardly applicable in real-world scenarios due to the domain gap between the synthetic and real-world datasets or the requirement of prior information. To overcome these limitations, we propose a novel self-supervised framework ACL-SPC for point cloud completion to train and test on the same data. ACL-SPC takes a single partial input and attempts to output the complete point cloud using an adaptive closed-loop (ACL) system that enforces the output same for the variation of an input. We evaluate our ACL-SPC on various datasets to prove that it can successfully learn to complete a partial point cloud as the first self-supervised scheme. Results show that our method is comparable with unsupervised methods and achieves superior performance on the real-world dataset compared to the supervised methods trained on the synthetic dataset. Extensive experiments justify the necessity of self-supervised learning and the effectiveness of our proposed method for the real-world point cloud completion task. The code is publicly available from this link.