SFD2: Semantic-Guided Feature Detection and Description
{kind=link}
Abstract
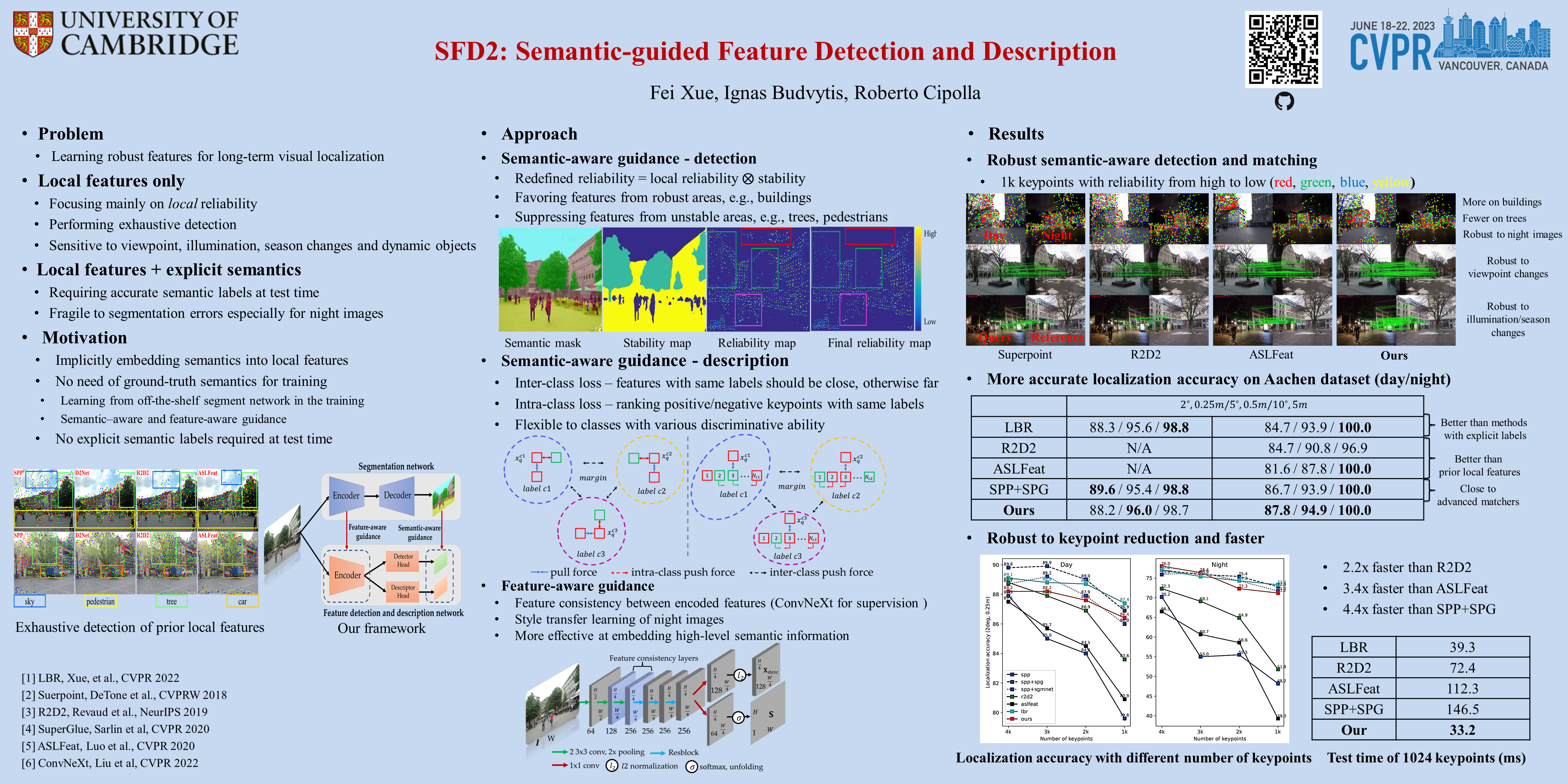
Visual localization is a fundamental task for various applications including autonomous driving and robotics. Prior methods focus on extracting large amounts of often redundant locally reliable features, resulting in limited efficiency and accuracy, especially in large-scale environments under challenging conditions. Instead, we propose to extract globally reliable features by implicitly embedding high-level semantics into both the detection and description processes. Specifically, our semantic-aware detector is able to detect keypoints from reliable regions (e.g. building, traffic lane) and suppress reliable areas (e.g. sky, car) implicitly instead of relying on explicit semantic labels. This boosts the accuracy of keypoint matching by reducing the number of features sensitive to appearance changes and avoiding the need of additional segmentation networks at test time. Moreover, our descriptors are augmented with semantics and have stronger discriminative ability, providing more inliers at test time. Particularly, experiments on long-term large-scale visual localization Aachen Day-Night and RobotCar-Seasons datasets demonstrate that our model outperforms previous local features and gives competitive accuracy to advanced matchers but is about 2 and 3 times faster when using 2k and 4k keypoints, respectively.