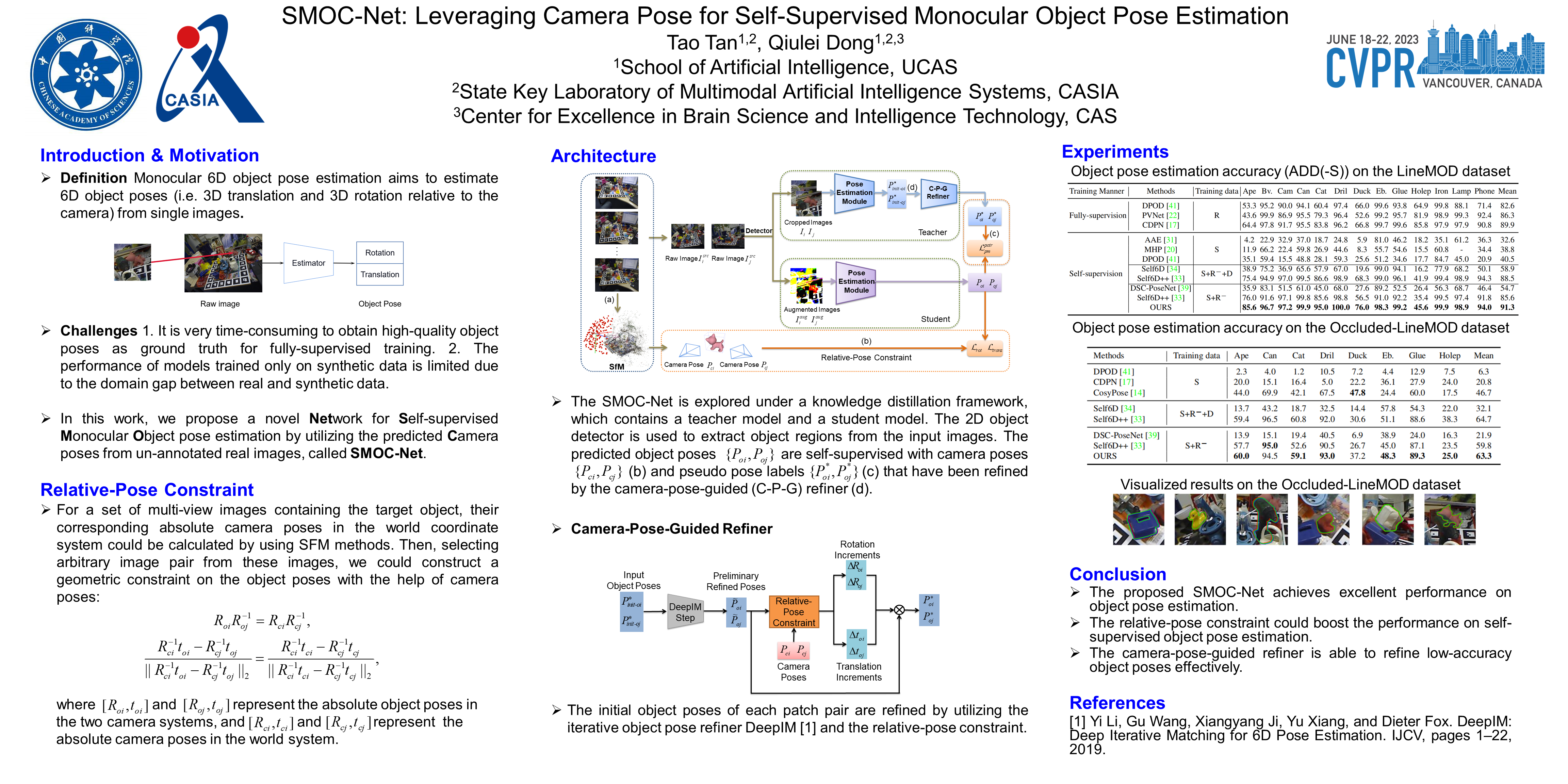
SMOC-Net: Leveraging Camera Pose for Self-Supervised Monocular Object Pose Estimation
 Highlight
Highlight
{kind=link}
Abstract
Recently, self-supervised 6D object pose estimation, where synthetic images with object poses (sometimes jointly with un-annotated real images) are used for training, has attracted much attention in computer vision. Some typical works in literature employ a time-consuming differentiable renderer for object pose prediction at the training stage, so that (i) their performances on real images are generally limited due to the gap between their rendered images and real images and (ii) their training process is computationally expensive. To address the two problems, we propose a novel Network for Self-supervised Monocular Object pose estimation by utilizing the predicted Camera poses from un-annotated real images, called SMOC-Net. The proposed network is explored under a knowledge distillation framework, consisting of a teacher model and a student model. The teacher model contains a backbone estimation module for initial object pose estimation, and an object pose refiner for refining the initial object poses using a geometric constraint (called relative-pose constraint) derived from relative camera poses. The student model gains knowledge for object pose estimation from the teacher model by imposing the relative-pose constraint. Thanks to the relative-pose constraint, SMOC-Net could not only narrow the domain gap between synthetic and real data but also reduce the training cost. Experimental results on two public datasets demonstrate that SMOC-Net outperforms several state-of-the-art methods by a large margin while requiring much less training time than the differentiable-renderer-based methods.