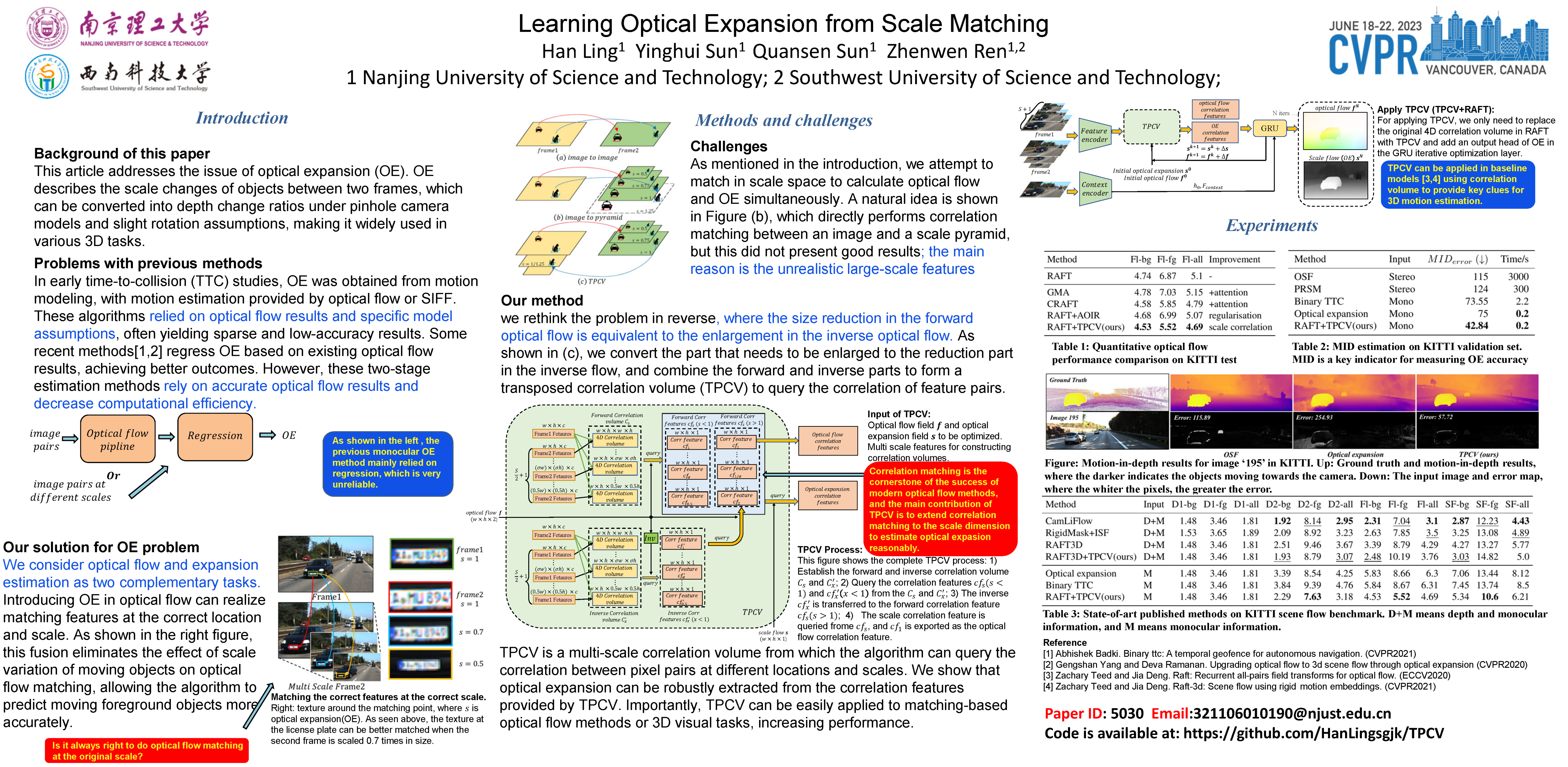
Learning Optical Expansion From Scale Matching
{kind=link}
Abstract
This paper address the problem of optical expansion (OE). OE describes the object scale change between two frames, widely used in monocular 3D vision tasks. Previous methods estimate optical expansion mainly from optical flow results, but this two-stage architecture makes their results limited by the accuracy of optical flow and less robust. To solve these problems, we propose the concept of 3D optical flow by integrating optical expansion into the 2D optical flow, which is implemented by a plug-and-play module, namely TPCV. TPCV implements matching features at the correct location and scale, thus allowing the simultaneous optimization of optical flow and optical expansion tasks. Experimentally, we apply TPCV to the RAFT optical flow baseline. Experimental results show that the baseline optical flow performance is substantially improved. Moreover, we apply the optical flow and optical expansion results to various dynamic 3D vision tasks, including motion-in-depth, time-to-collision, and scene flow, often achieving significant improvement over the prior SOTA. Code will be available at https://github.com/HanLingsgjk/TPCV.