Towards Unsupervised Object Detection From LiDAR Point Clouds
{kind=link}
Abstract
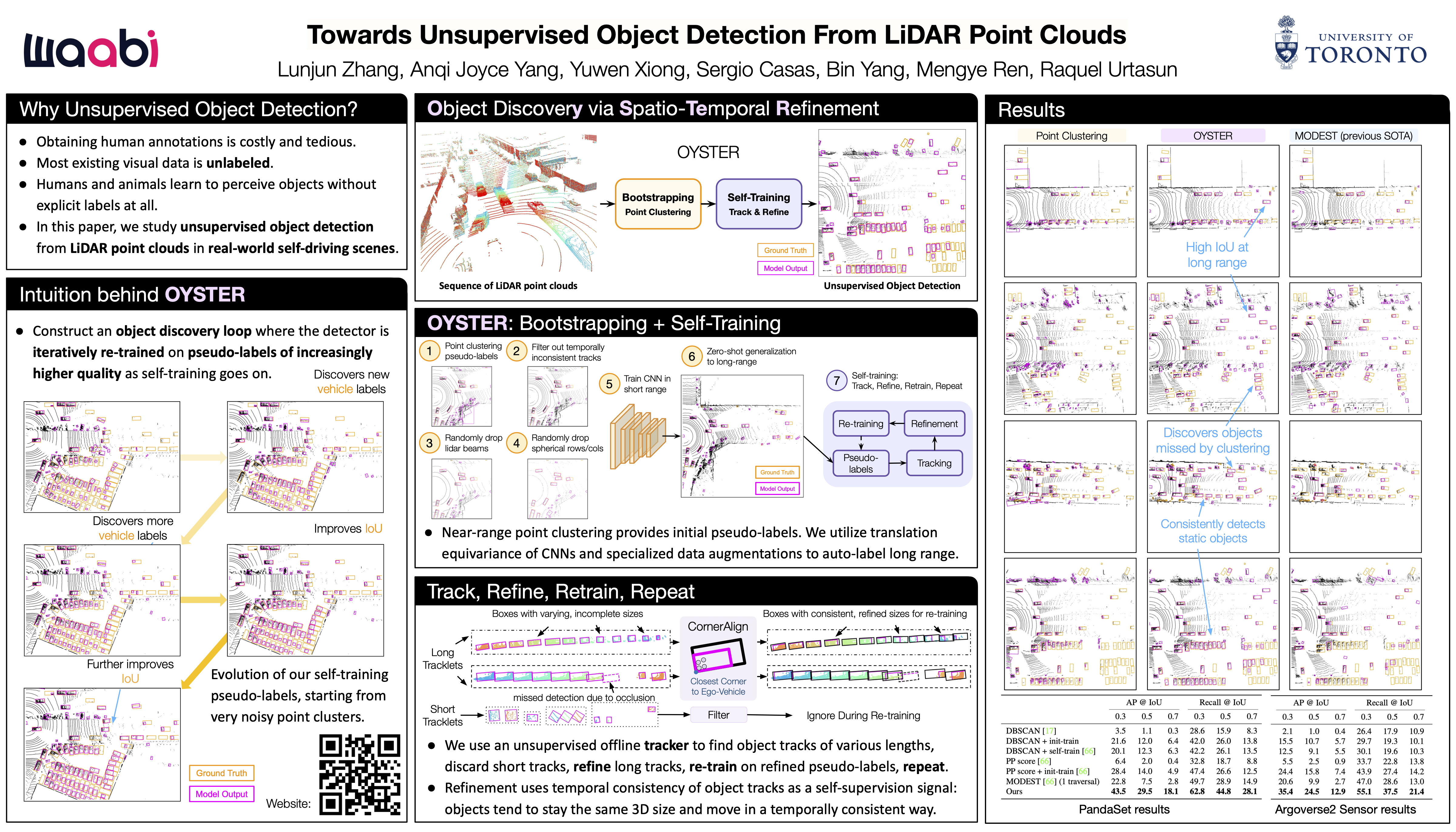
In this paper, we study the problem of unsupervised object detection from 3D point clouds in self-driving scenes. We present a simple yet effective method that exploits (i) point clustering in near-range areas where the point clouds are dense, (ii) temporal consistency to filter out noisy unsupervised detections, (iii) translation equivariance of CNNs to extend the auto-labels to long range, and (iv) self-supervision for improving on its own. Our approach, OYSTER (Object Discovery via Spatio-Temporal Refinement), does not impose constraints on data collection (such as repeated traversals of the same location), is able to detect objects in a zero-shot manner without supervised finetuning (even in sparse, distant regions), and continues to self-improve given more rounds of iterative self-training. To better measure model performance in self-driving scenarios, we propose a new planning-centric perception metric based on distance-to-collision. We demonstrate that our unsupervised object detector significantly outperforms unsupervised baselines on PandaSet and Argoverse 2 Sensor dataset, showing promise that self-supervision combined with object priors can enable object discovery in the wild. For more information, visit the project website: https://waabi.ai/research/oyster.