Complete-to-Partial 4D Distillation for Self-Supervised Point Cloud Sequence Representation Learning
{kind=link}
Abstract
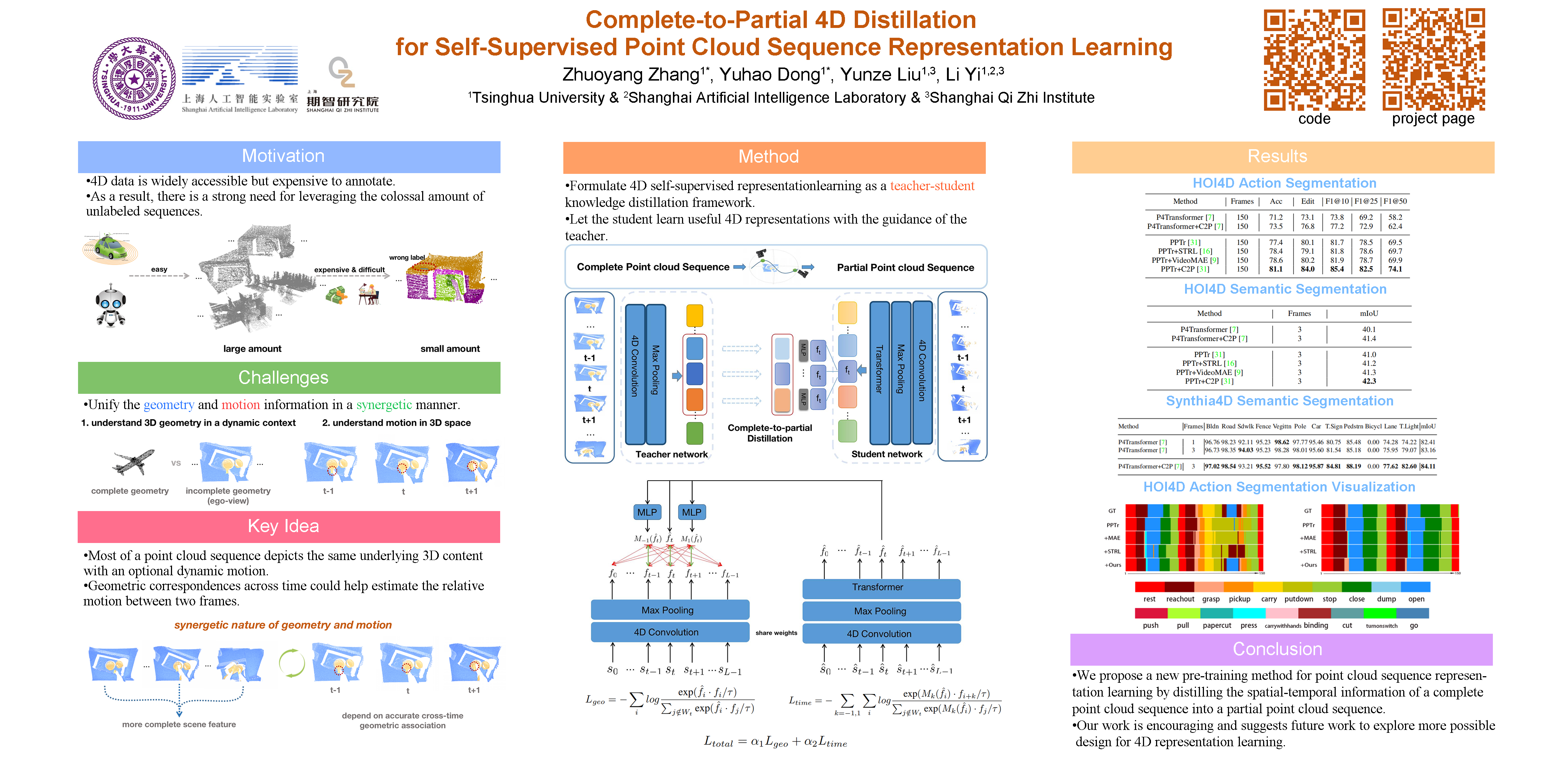
Recent work on 4D point cloud sequences has attracted a lot of attention. However, obtaining exhaustively labeled 4D datasets is often very expensive and laborious, so it is especially important to investigate how to utilize raw unlabeled data. However, most existing self-supervised point cloud representation learning methods only consider geometry from a static snapshot omitting the fact that sequential observations of dynamic scenes could reveal more comprehensive geometric details. To overcome such issues, this paper proposes a new 4D self-supervised pre-training method called Complete-to-Partial 4D Distillation. Our key idea is to formulate 4D self-supervised representation learning as a teacher-student knowledge distillation framework and let the student learn useful 4D representations with the guidance of the teacher. Experiments show that this approach significantly outperforms previous pre-training approaches on a wide range of 4D point cloud sequence understanding tasks. Code is available at: https://github.com/dongyh20/C2P.