K3DN: Disparity-Aware Kernel Estimation for Dual-Pixel Defocus Deblurring
{kind=link}
Abstract
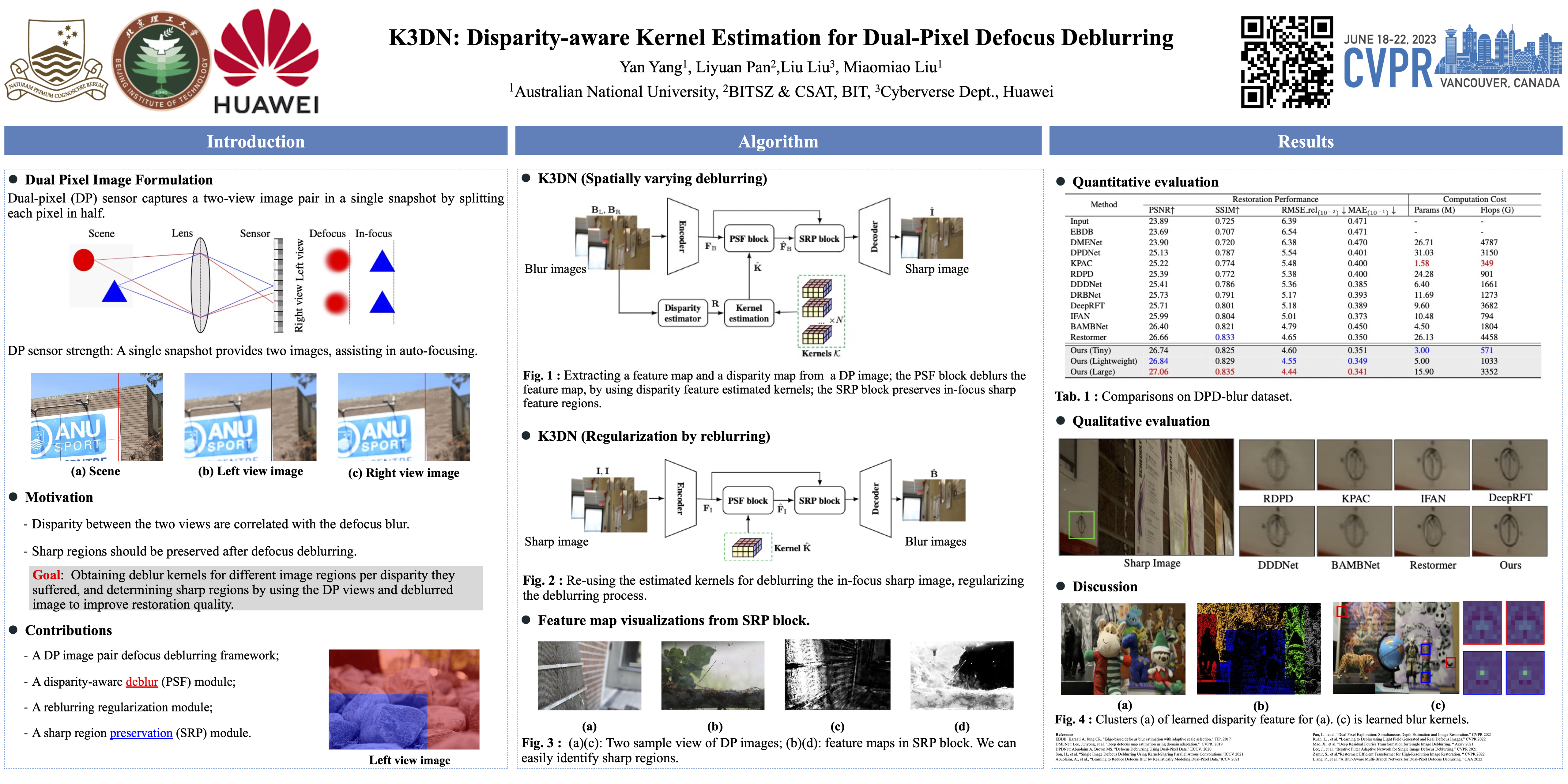
The dual-pixel (DP) sensor captures a two-view image pair in a single snapshot by splitting each pixel in half. The disparity occurs in defocus blurred regions between the two views of the DP pair, while the in-focus sharp regions have zero disparity. This motivates us to propose a K3DN framework for DP pair deblurring, and it has three modules: i) a disparity-aware deblur module. It estimates a disparity feature map, which is used to query a trainable kernel set to estimate a blur kernel that best describes the spatially-varying blur. The kernel is constrained to be symmetrical per the DP formulation. A simple Fourier transform is performed for deblurring that follows the blur model; ii) a reblurring regularization module. It reuses the blur kernel, performs a simple convolution for reblurring, and regularizes the estimated kernel and disparity feature unsupervisedly, in the training stage; iii) a sharp region preservation module. It identifies in-focus regions that correspond to areas with zero disparity between DP images, aims to avoid the introduction of noises during the deblurring process, and improves image restoration performance. Experiments on four standard DP datasets show that the proposed K3DN outperforms state-of-the-art methods, with fewer parameters and flops at the same time.