Adaptive Zone-Aware Hierarchical Planner for Vision-Language Navigation
{kind=link}
Abstract
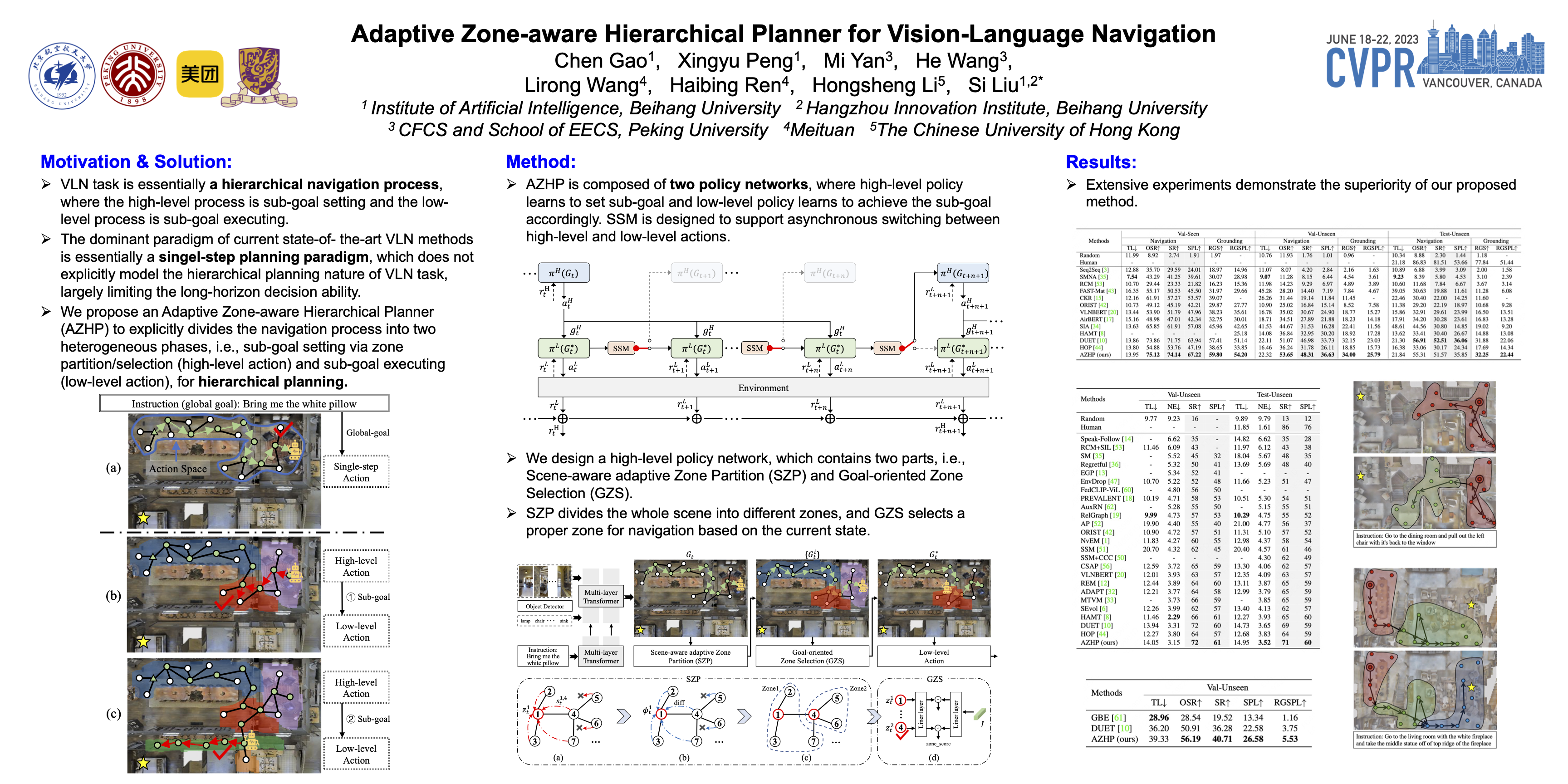
The task of Vision-Language Navigation (VLN) is for an embodied agent to reach the global goal according to the instruction. Essentially, during navigation, a series of sub-goals need to be adaptively set and achieved, which is naturally a hierarchical navigation process. However, previous methods leverage a single-step planning scheme, i.e., directly performing navigation action at each step, which is unsuitable for such a hierarchical navigation process. In this paper, we propose an Adaptive Zone-aware Hierarchical Planner (AZHP) to explicitly divides the navigation process into two heterogeneous phases, i.e., sub-goal setting via zone partition/selection (high-level action) and sub-goal executing (low-level action), for hierarchical planning. Specifically, AZHP asynchronously performs two levels of action via the designed State-Switcher Module (SSM). For high-level action, we devise a Scene-aware adaptive Zone Partition (SZP) method to adaptively divide the whole navigation area into different zones on-the-fly. Then the Goal-oriented Zone Selection (GZS) method is proposed to select a proper zone for the current sub-goal. For low-level action, the agent conducts navigation-decision multi-steps in the selected zone. Moreover, we design a Hierarchical RL (HRL) strategy and auxiliary losses with curriculum learning to train the AZHP framework, which provides effective supervision signals for each stage. Extensive experiments demonstrate the superiority of our proposed method, which achieves state-of-the-art performance on three VLN benchmarks (REVERIE, SOON, R2R).