Shape-Constraint Recurrent Flow for 6D Object Pose Estimation
{kind=link}
Abstract
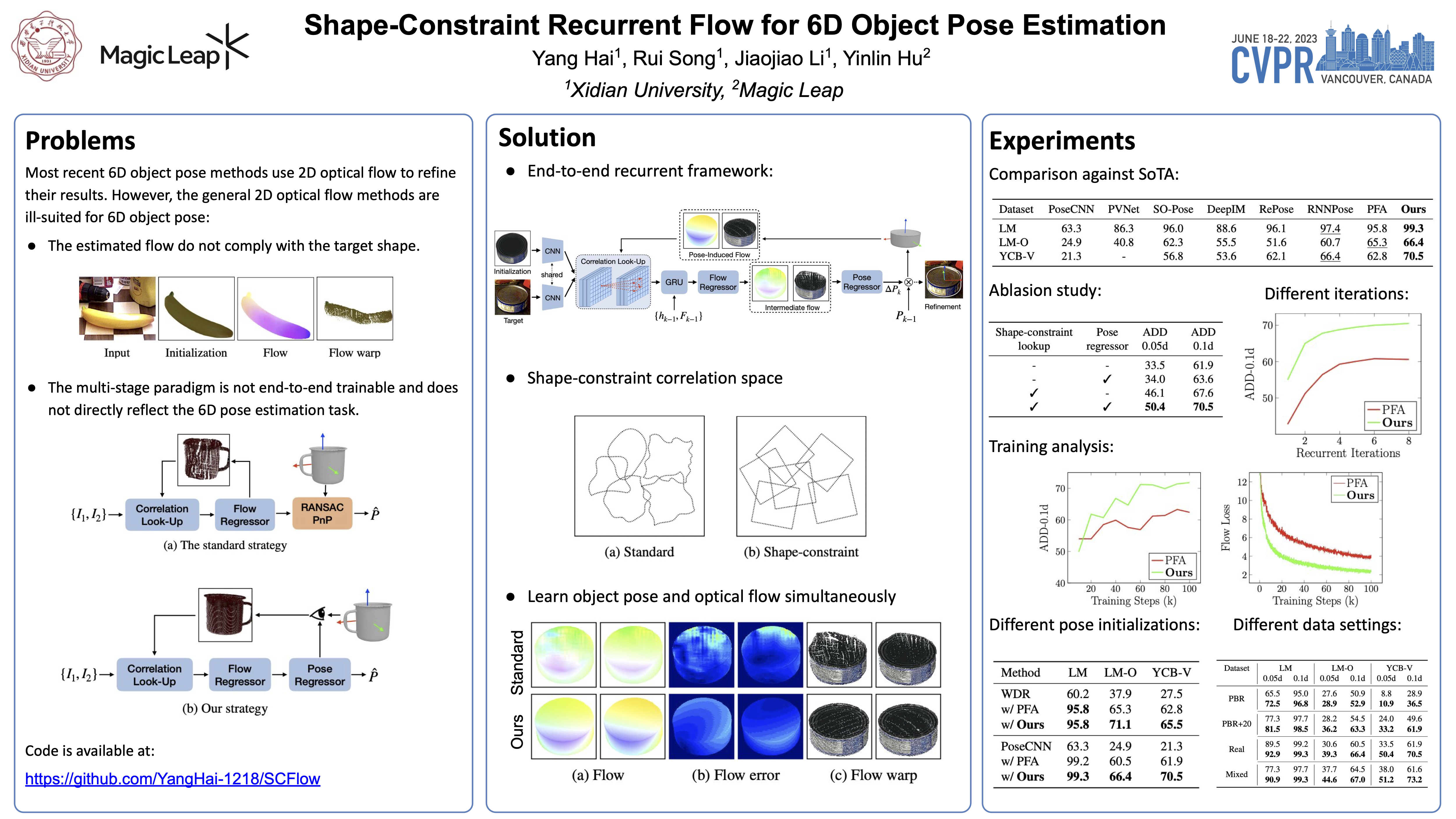
Most recent 6D object pose estimation methods rely on 2D optical flow networks to refine their results. However, these optical flow methods typically do not consider any 3D shape information of the targets during matching, making them suffer in 6D object pose estimation. In this work, we propose a shape-constraint recurrent flow network for 6D object pose estimation, which embeds the 3D shape information of the targets into the matching procedure. We first introduce a flow-to-pose component to learn an intermediate pose from the current flow estimation, then impose a shape constraint from the current pose on the lookup space of the 4D correlation volume for flow estimation, which reduces the matching space significantly and is much easier to learn. Finally, we optimize the flow and pose simultaneously in a recurrent manner until convergence. We evaluate our method on three challenging 6D object pose datasets and show that it outperforms the state of the art in both accuracy and efficiency.