JAWS: Just a Wild Shot for Cinematic Transfer in Neural Radiance Fields
{kind=link}
Abstract
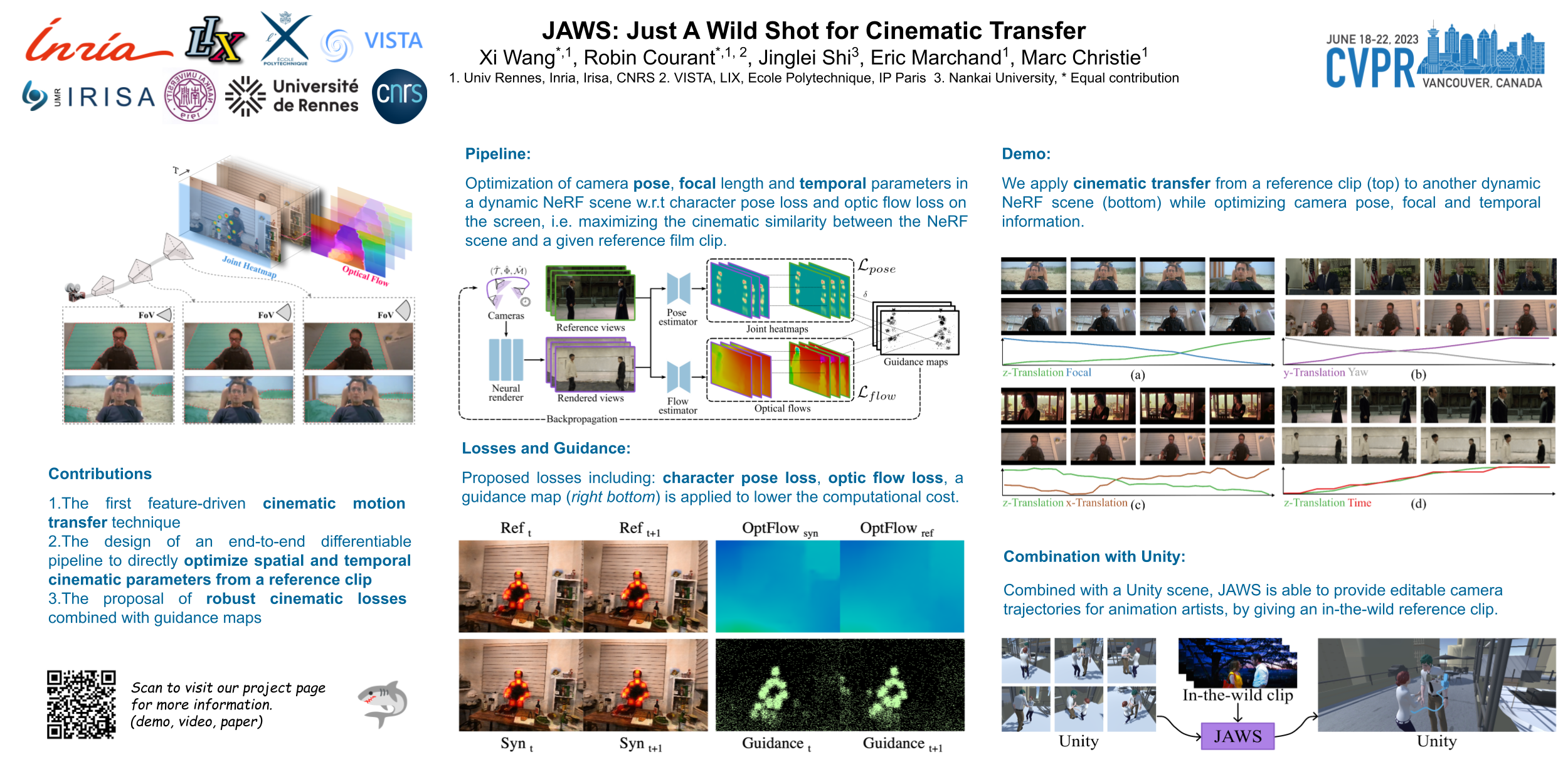
This paper presents JAWS, an optimzation-driven approach that achieves the robust transfer of visual cinematic features from a reference in-the-wild video clip to a newly generated clip. To this end, we rely on an implicit-neural-representation (INR) in a way to compute a clip that shares the same cinematic features as the reference clip. We propose a general formulation of a camera optimization problem in an INR that computes extrinsic and intrinsic camera parameters as well as timing. By leveraging the differentiability of neural representations, we can back-propagate our designed cinematic losses measured on proxy estimators through a NeRF network to the proposed cinematic parameters directly. We also introduce specific enhancements such as guidance maps to improve the overall quality and efficiency. Results display the capacity of our system to replicate well known camera sequences from movies, adapting the framing, camera parameters and timing of the generated video clip to maximize the similarity with the reference clip.