ARKitTrack: A New Diverse Dataset for Tracking Using Mobile RGB-D Data
{kind=link}
Abstract
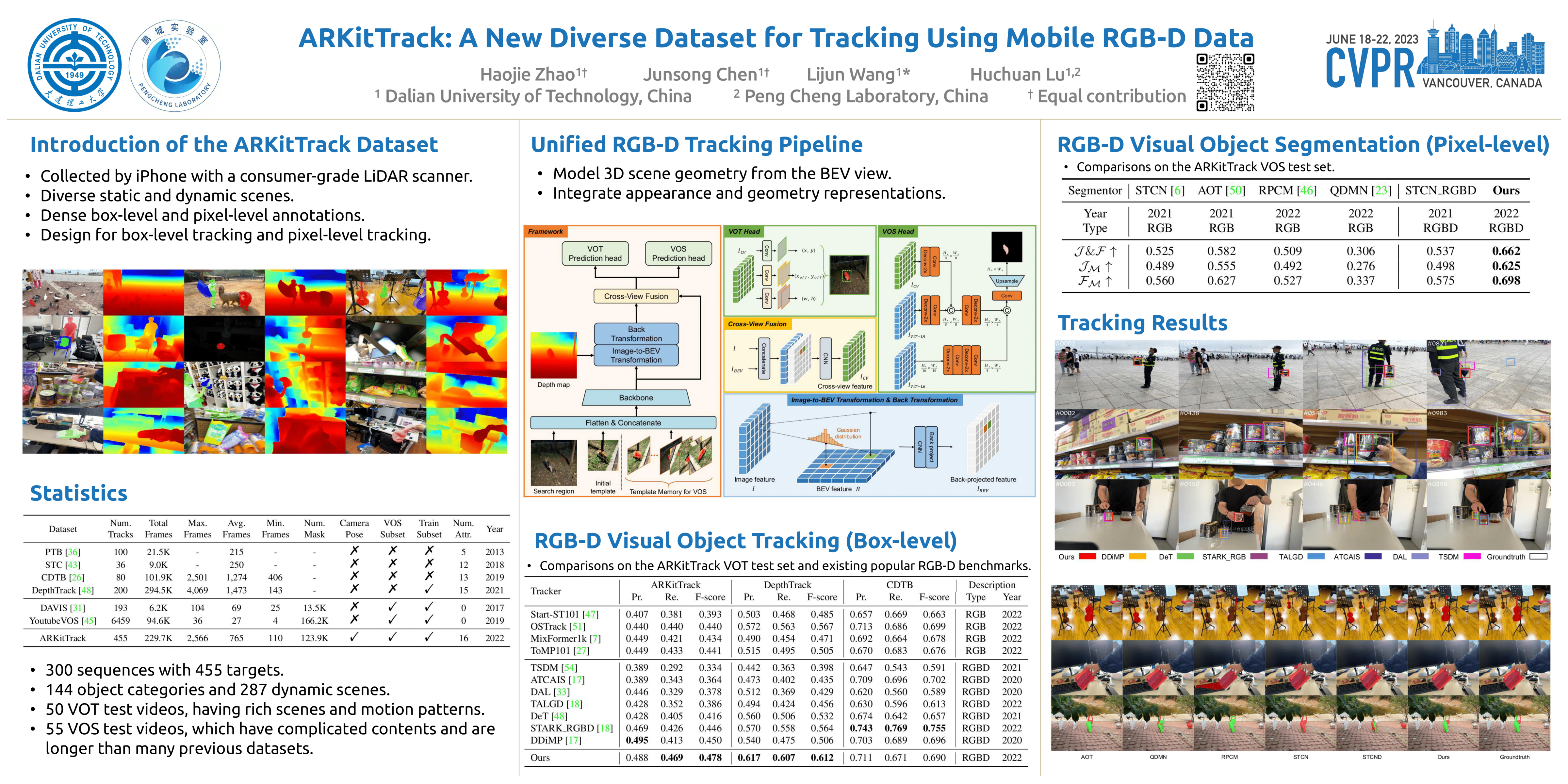
Compared with traditional RGB-only visual tracking, few datasets have been constructed for RGB-D tracking. In this paper, we propose ARKitTrack, a new RGB-D tracking dataset for both static and dynamic scenes captured by consumer-grade LiDAR scanners equipped on Apple’s iPhone and iPad. ARKitTrack contains 300 RGB-D sequences, 455 targets, and 229.7K video frames in total. Along with the bounding box annotations and frame-level attributes, we also annotate this dataset with 123.9K pixel-level target masks. Besides, the camera intrinsic and camera pose of each frame are provided for future developments. To demonstrate the potential usefulness of this dataset, we further present a unified baseline for both box-level and pixel-level tracking, which integrates RGB features with bird’s-eye-view representations to better explore cross-modality 3D geometry. In-depth empirical analysis has verified that the ARKitTrack dataset can significantly facilitate RGB-D tracking and that the proposed baseline method compares favorably against the state of the arts. The source code and dataset will be released.