Learning Human-to-Robot Handovers From Point Clouds
 Highlight
Highlight
{kind=link}
Abstract
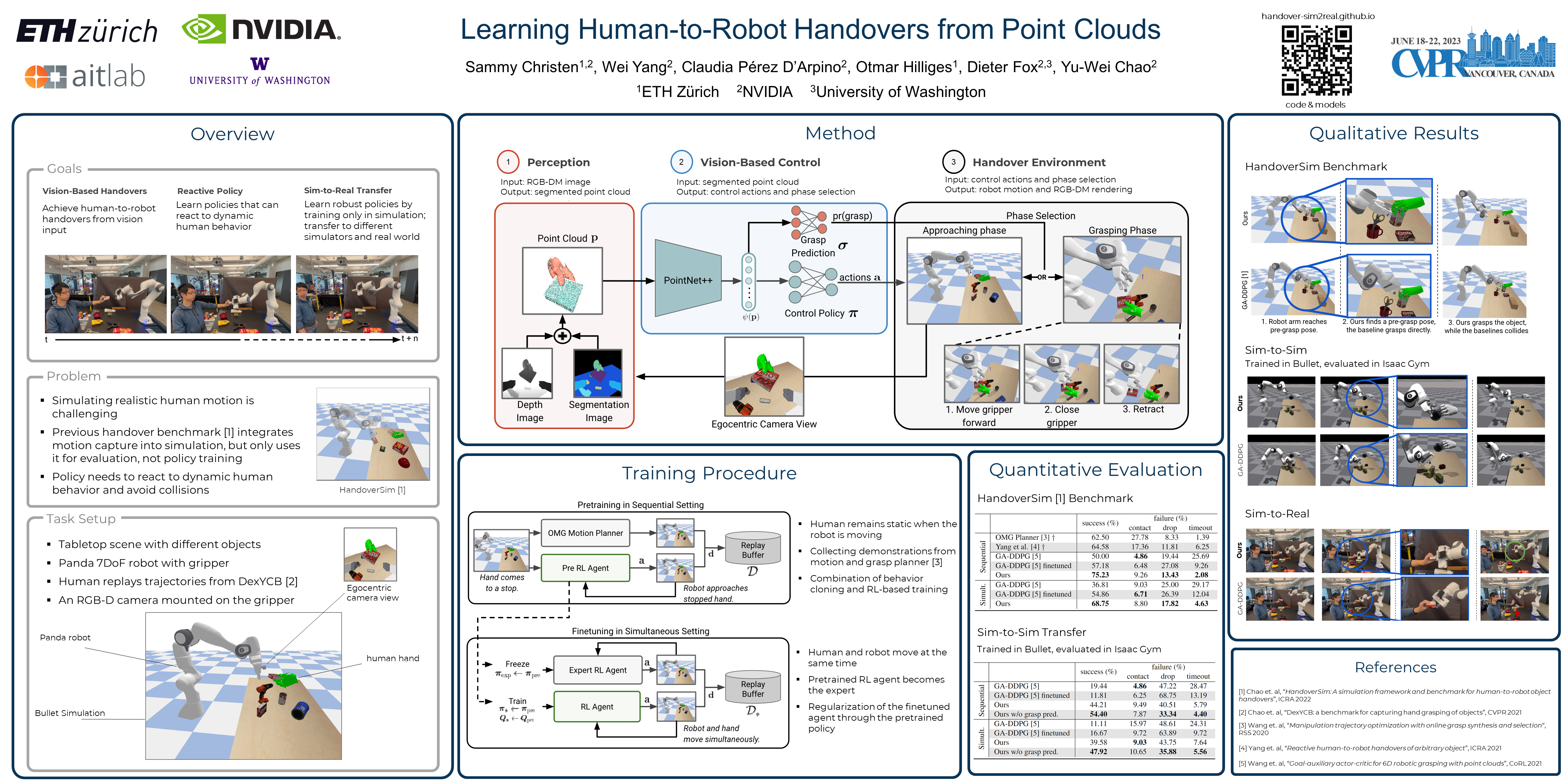
We propose the first framework to learn control policies for vision-based human-to-robot handovers, a critical task for human-robot interaction. While research in Embodied AI has made significant progress in training robot agents in simulated environments, interacting with humans remains challenging due to the difficulties of simulating humans. Fortunately, recent research has developed realistic simulated environments for human-to-robot handovers. Leveraging this result, we introduce a method that is trained with a human-in-the-loop via a two-stage teacher-student framework that uses motion and grasp planning, reinforcement learning, and self-supervision. We show significant performance gains over baselines on a simulation benchmark, sim-to-sim transfer and sim-to-real transfer.