Object-Goal Visual Navigation via Effective Exploration of Relations Among Historical Navigation States
{kind=link}
Abstract
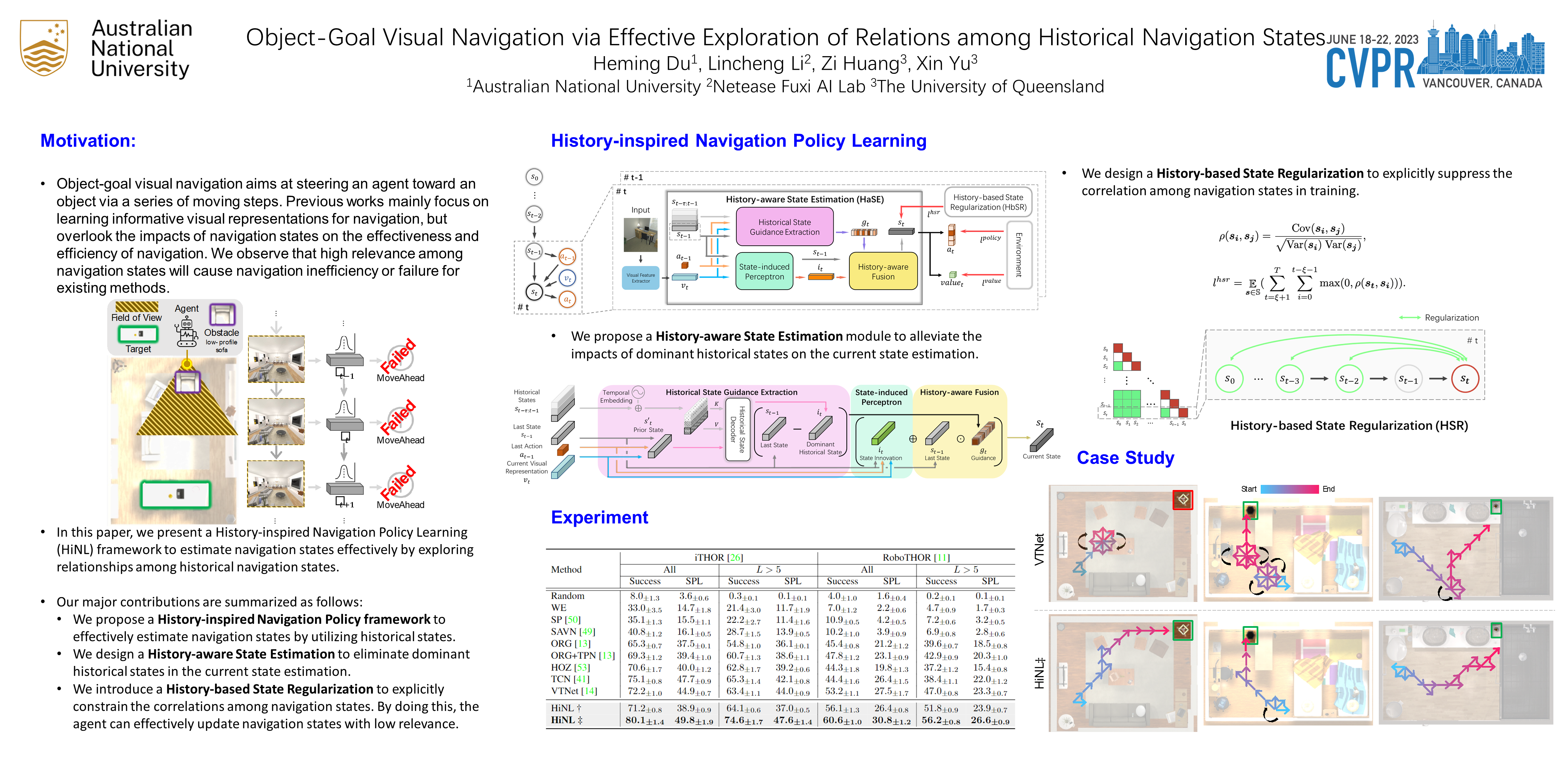
Object-goal visual navigation aims at steering an agent toward an object via a series of moving steps. Previous works mainly focus on learning informative visual representations for navigation, but overlook the impacts of navigation states on the effectiveness and efficiency of navigation. We observe that high relevance among navigation states will cause navigation inefficiency or failure for existing methods. In this paper, we present a History-inspired Navigation Policy Learning (HiNL) framework to estimate navigation states effectively by exploring relationships among historical navigation states. In HiNL, we propose a History-aware State Estimation (HaSE) module to alleviate the impacts of dominant historical states on the current state estimation. Meanwhile, HaSE also encourages an agent to be alert to the current observation changes, thus enabling the agent to make valid actions. Furthermore, we design a History-based State Regularization (HbSR) to explicitly suppress the correlation among navigation states in training. As a result, our agent can update states more effectively while reducing the correlations among navigation states. Experiments on the artificial platform AI2-THOR (i.e.,, iTHOR and RoboTHOR) demonstrate that HiNL significantly outperforms state-of-the-art methods on both Success Rate and SPL in unseen testing environments.