GANmouflage: 3D Object Nondetection With Texture Fields
{kind=link}
Abstract
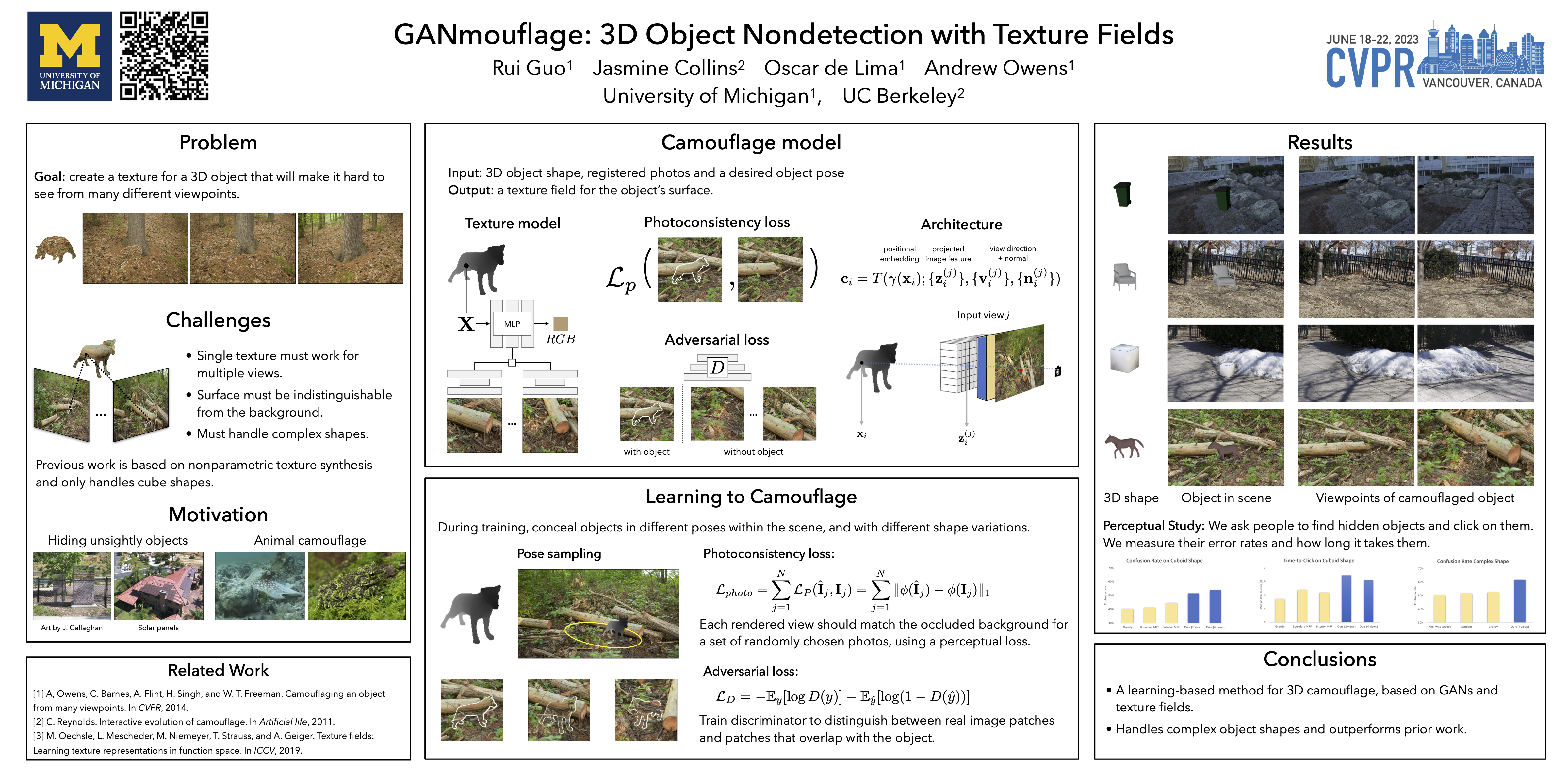
We propose a method that learns to camouflage 3D objects within scenes. Given an object’s shape and a distribution of viewpoints from which it will be seen, we estimate a texture that will make it difficult to detect. Successfully solving this task requires a model that can accurately reproduce textures from the scene, while simultaneously dealing with the highly conflicting constraints imposed by each viewpoint. We address these challenges with a model based on texture fields and adversarial learning. Our model learns to camouflage a variety of object shapes from randomly sampled locations and viewpoints within the input scene, and is the first to address the problem of hiding complex object shapes. Using a human visual search study, we find that our estimated textures conceal objects significantly better than previous methods.