Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion
{kind=link}
Abstract
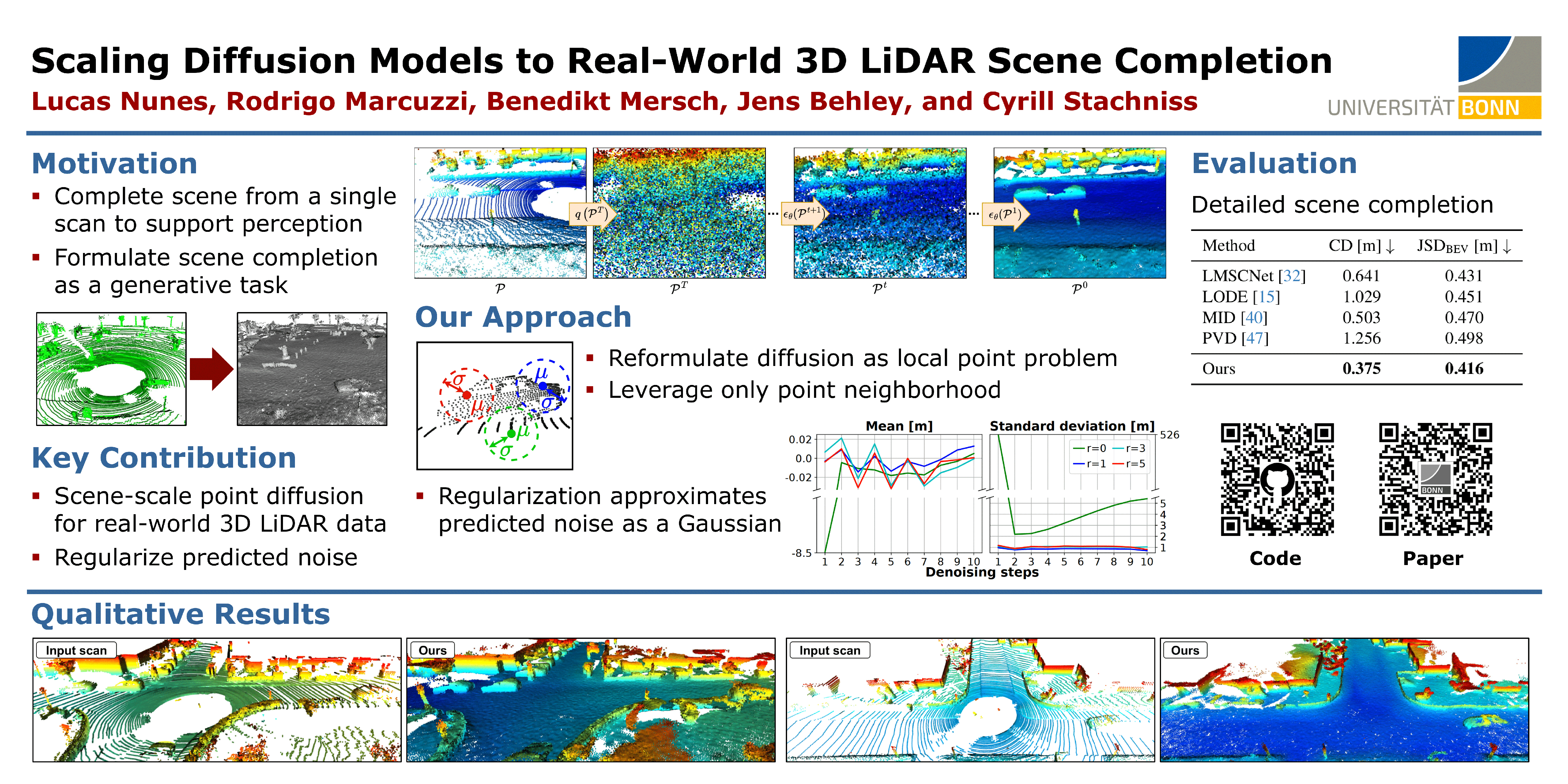
Computer vision techniques play a central role in the perception stack of autonomous vehicles. Such methods are employed to perceive the vehicle surroundings given sensor data. 3D LiDAR sensors are commonly used to collect sparse 3D point clouds from the scene. However, compared to human perception, such systems struggle to deduce the unseen parts of the scene given those sparse point clouds. In this matter, the scene completion task aims at predicting the gaps in the LiDAR measurements to achieve a more complete scene representation. Given the promising results of recent diffusion models as generative models for images, we propose extending them to achieve scene completion from a single 3D LiDAR scan. Previous works used diffusion models over range images extracted from LiDAR data, directly applying image-based diffusion methods. Distinctly, we propose to directly operate on the points, reformulating the noising and denoising diffusion process such that it can efficiently work at scene scale. Together with our approach, we propose a regularization loss to stabilize the noise predicted during the denoising process. Our experimental evaluation shows that our method can complete the scene given a single LiDAR scan as input, producing a scene with more details compared to state-of-the-art scene completion methods. We believe that our proposed diffusion process formulation can support further research in diffusion models applied to scene-scale point cloud data.