Object Dynamics Modeling with Hierarchical Point Cloud-based Representations
{kind=link}
Abstract
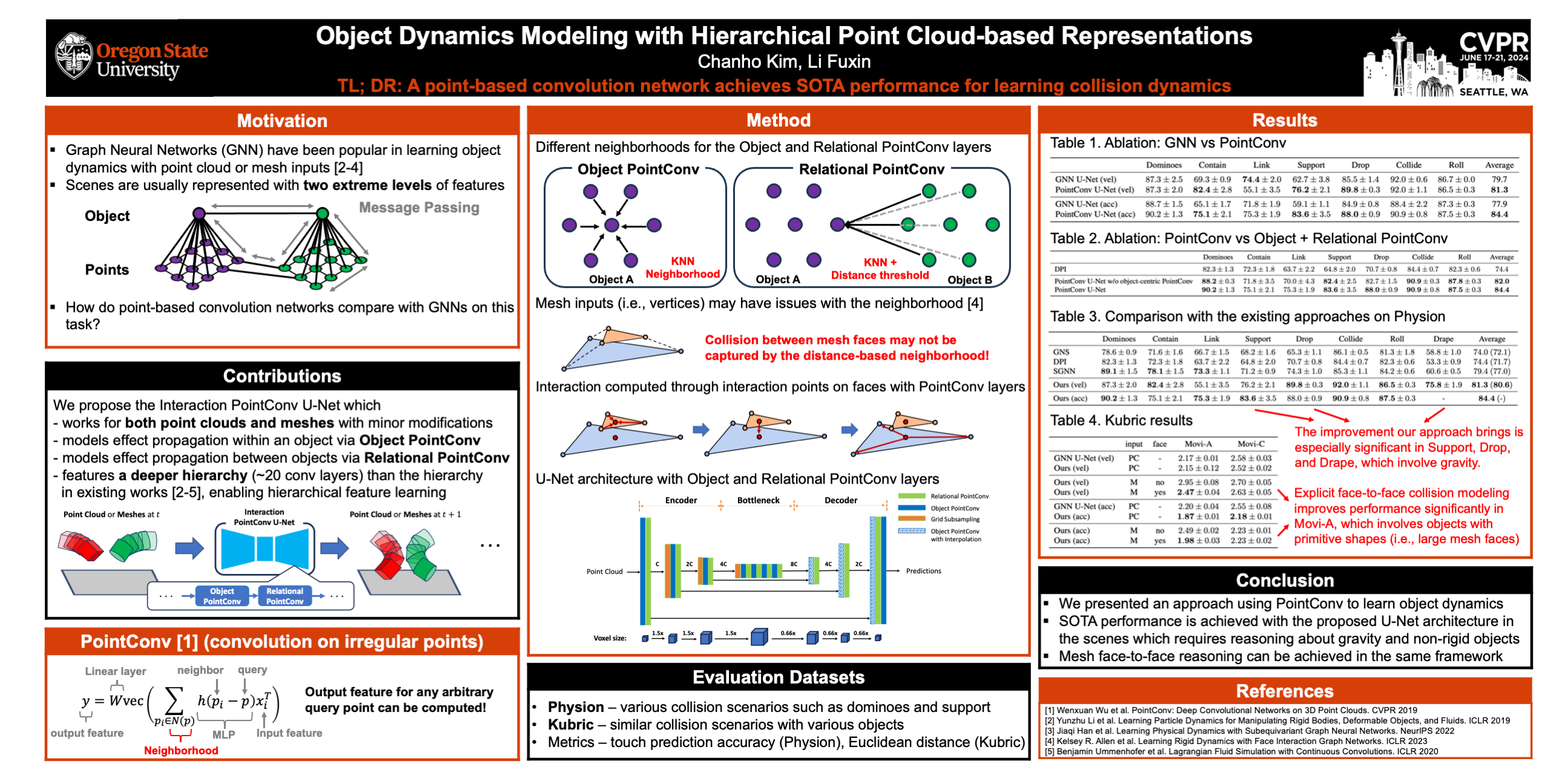
Modeling object dynamics with a neural network is an important problem with numerous applications. Most recent work has been based on graph neural networks. However, physics happens in 3D space, where geometric information potentially plays an important role in modeling physical phenomena. In this work, we propose a novel U-net architecture based on continuous point convolution which naturally embeds information from 3D coordinates and allows for multi-scale feature representations with established downsampling and upsampling procedures. Bottleneck layers in the downsampled point clouds lead to better long-range interaction modeling. Besides, the flexibility of point convolutions allows us to generalize to sparsely sampled points from mesh vertices and dynamically generate features on important interaction points on mesh faces. Experimental results demonstrate that our approach significantly improves the state-of-the-art, especially in scenarios that require accurate gravity or collision reasoning.